
公式整理
第1章 导论
误差
绝对误差:
绝对误差限:
相对误差:
相对误差限:
有效数字
有效数字: 用科学记数法, 记, 若(即的截取按照四舍五入规则), 则称为n位有效数字, 精确到
有效数字→相对误差限
- 已知有n位有效数字, 其相对误差限为
相对误差限→有效数字
- 已知 x* 的相对误差限可写为
- 则:
误差传递
加法:
- 误差限直接相加
乘法:
- 会受影响
除法:
第2章 插值法
拉格朗日插值
拉格朗日余项
牛顿插值
差商(均差)
牛顿插值多项式
基础:
代入差商得
均差的性质
①k阶均差-f(x)的线性表示
②差商与x的顺序无关
- 如
③k阶差商与k阶导
当在包含节点的区间存在时,在之间必存在一点,使得
Hermite插值
两点三次Hermite插值
应满足插值条件
用四个基函数表示
余项
第4章 数值积分
简单的积分近似计算方式:
- 求积节点一般是给定的, 我们的目标就是确定求积系数
Newton-Cotes数值求积分
积分区间:
求积节点:
求积系数:
- 为Cotes系数, 仅取决于n和k, 查表获取
余项:
- 实际上就是拉格朗日余项求积
低阶Newton-Cotes公式
梯形公式(n=1)
求积节点:
梯形求积公式(两点公式):
梯形公式余项:
- 梯形(trapezia)公式具有1次代数精度
Simpson公式(n=2)
求积节点:
Simpson求积公式(三点公式, 抛物线公式):
Simpson公式的余项:
- Simpson公式具有3次代数精度
Newton-Cotes公式 代数精度定理
定理:当n为偶数时,Newton-Cotes公式至少具有n+1次代数精度
Newton-Cotes公式的稳定性
记精确值为,近似值为, 误差
则积分精确值和近似值误差为:
- 性质
结论
Newton-Cotes公式的舍入误差只是函数值误差的**(b-a)倍**
即时, Newton-Cotes公式是稳定的
- 稳定: 指误差是否会在计算过程中显著增长
- 实际上, 当n<8时, 公式都是稳定的
若有正有负,有
此时,公式的稳定性将无法保证
- 因此,在实际应用中一般不使用高阶Newton-Cotes公式, 而是采用低阶复合求积法
复合求积公式
公式与余项
| 求积公式 | 单纯求积公式的余项 | 复合求积公式的余项 | |
|---|---|---|---|
- 复合求积公式的误差就是将小区间(长度为步长h)的误差逐个累加
收敛阶
定义: 若一个积分公式的误差满足 则称该公式是 阶收敛的。
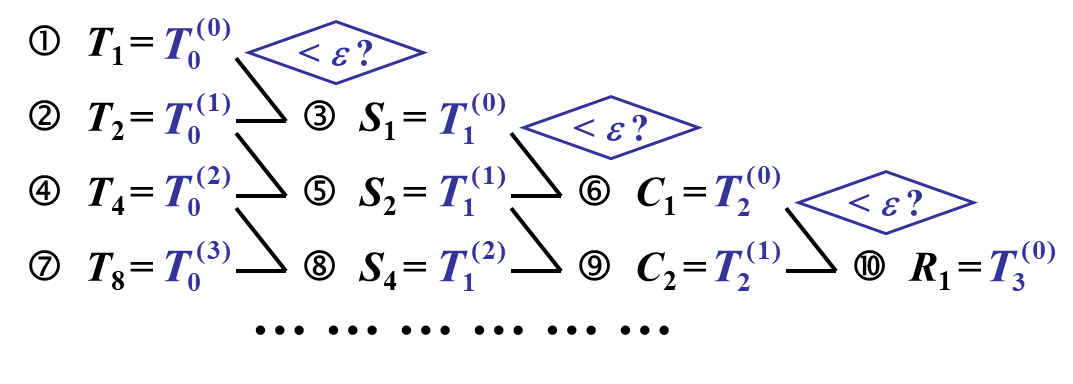
龙贝格算法
第一级计算公式(梯形递推公式):
- 也叫逐次分半复化梯形公式
- 如[0,1], 对于k=3, 步长为, 右边加的数就是
加速公式:
第5章 解线性方程组的直接方法
矩阵三角分解法
杜立特分解法
- 其中U的第一行等于矩阵A的第一行
- L的第一列
- 其他元素通过矩阵乘法 (解方程)计算 出来
向量和矩阵范数
在向量空间中, , 常用的向量x的范数
x的2-范数或欧氏范数:
x的1-范数:
x的∞范数(最大范数):
x的p-范数:
算子范数:
特别有:
- 行和范数: (最大的行之和)
- 列和范数: (最大的 列之和)
- 2-范数: (矩阵的最大特征值)
谱半径
定义 矩阵A的谱半径记为,其中 为A的特征根
线性方程组误差分析
是关键的误差放大因子, 称为A的条件数, 即为
- 越大, A越病态, 难以求得准确解
根据算子范数的不同, 条件数也不同
条件数的性质
- A可逆, 则
- A可逆, ,则
- A正交, 则
- A可逆, R正交, 则
第6章 解线性方程组的迭代法
迭代过程通用表示: , 其中
- B称为迭代矩阵, f为常数项
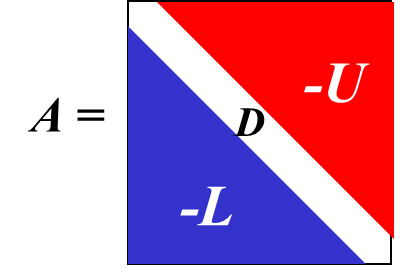
雅可比迭代
迭代过程:
其中: , 为方程组系数矩阵A的对角线
Gauss-Seidel迭代法
迭代过程:
迭代法收敛性
判断是否收敛:
- 是否严格对角占优
算出迭代矩阵B
- 范数是否<1 (用∞和1范数即可, 2范数不如直接算谱半径)
- 算谱半径, 判断是否<1
定理1: 迭代格式收敛的充要条件为
- 不常用, 矩阵乘法可太难算了
定理2: 迭代格式收敛的充要条件为谱半径
- 因为矩阵的谱半径不超过其任一种算子范数,即 , 可得如下充分条件
定理 (充分条件) 若存在一个矩阵范数使得, 则迭代收敛,且有下列误差估计:
定理(充分条件): 若线性方程组的系数矩阵为严格对角占优矩阵,则Jacobi法和法均收敛
- 矩阵严格对角占优: 对角线上的值比行上的其他值加起来都大
- 可得
第7章 非线性方程与方程组的数值解法
二分法
设[a,b]为单根区间
取中点
若, 记为中的根
若, 则为有根区间, 令
若, 则为有根区间, 令
一轮操作后, 有根区间缩小为一半
循环, 继续取的中点, 得到新区间
以此类推, 有
对于每个小区间都有
确定适当的n, 可以得到任意要求的精度 ()
误差分析
对于第0步的有误差
第k步的误差:
对于给定的精度ε,可估计二分法所需的步数 k :
迭代法
不动点迭代法
将非线性方程化为一个同解方程, 且设连续
任取初值代入, 得
称上式为求解非线性方程的不动点迭代法
- 称为迭代函数, 为第k步迭代值
迭代法收敛定理
定理: 设迭代函数在[a,b]上连续, 且满足
- 当时,
- 存在一个整数L, 满足且, 有(上确界为L)
则有以下结论
- 方程在内有唯一解
- 对于任意初值, 迭代法均收敛于
收敛的阶
定义: 若存在实数和满足(同阶无穷小), 则称迭代法p阶收敛
- 当p=1称为线性收敛, p>1时称为超线性收敛, p=2时称为平方收敛
定理: 如果迭代法迭代函数 在根附近满足:
- 存在阶导数处连续;
- ,而
则迭代法的收敛阶是
牛顿法
迭代函数:
收敛的充分条件
设若
- (区间端点异号, 有根)
- 在整个区间上, 不变号, 且 (根唯一)
- 选取使得 (产生的序列单调有界, 保证收敛)
则牛顿迭代法产生的序列收敛到在区间内的唯一根
局部收敛性
设 ,若 x* 为 在[a, b]上的单根,且 ,则存在 x* 的邻域使得任取初值 ,Newton’s Method产生的序列收敛到x*,且满足
一些其他公式(失忆)
二项式定理
基本不等式