计算方法(数值分析)
误差和有效数字 基本概念
避免危害
数值分析: 将复杂的计算式转换为指令集中定义过的+、- (×、÷)输入到计算机中, 得到近似解
1.2 误差的背景介绍
1.2.1 来源与分类
| 来源 | 分类 |
|---|---|
| 从实际问题中抽象出数学模型 | 模型误差 |
| 通过测量得到模型中参数的值 | 观测误差 |
| 求近似解 | 方法误差(截断误差) |
| 机器字长有限 | 舍入误差 |
1.2.2 误差与有效数字
绝对误差
绝对误差:
- 精确值通常不可求得, 我们只能求出近似值
绝对误差限:
工程上常记为, 如
注意:
- e* 理论上讲是唯一确定的,可能取正,也可能取负。
- e*> 0 不唯一,当然 e* 越小越具有参考价值。
相对误差
相对误差:
相对误差限:
有效数字
看不懂的有效数字定义: 用科学记数法, 记, 若(即的截取按照四舍五入规则), 则称为n位有效数字, 精确到
- : 小数点前的位数 : 有效位数 : 小数点后位数 (经过四舍五入的结果)
- 有效数字即为绝对误差限
有效数字与相对误差的关系
有效数字→相对误差限
- 已知有n位有效数字, 其相对误差限为
相对误差限→有效数字
已知 x* 的相对误差限可写为
则:
是为了通过不等式消除
例: 为使的相对误差小于0.001%,至少应取几位有效数字?
需求: 从有效数字确定相对误差限
设取n位有效数字, 则其相对误差限为
要保证相对误差小于0.001%, 只要保证
已知 ,则从以上不等式可解得 ,即,应取
数值运算中的误差限
误差传递公式
误差: , 相对 误差, 函数值相对误差
相对误差限比值(条件数):
误差限公式
- 经过计算, 相对误差会被放大
加法:
- 误差限直接相加
乘法:
- 会受影响
除法:
要尽量避免除法的出现, 防止误差暴涨
其他注意事项
- 避免小分母: 分母过小会造成浮点溢出
- 避免相近二数相减
- 会导致有效数字减少
- 几种经验性避免方法:
- 当 | x | << 1 时:
- 避免大数吃小数
- 计算机浮点运算, 指数对齐导致的基数部分丢失
- 尽量减少运算次数
- 使用秦九昭算法
第2章 插值法
插值多项式的唯一性
拉格朗日插值公式, 误差, 余项
差商, 均差, 均差的性质
牛顿插值多项式的形式, 误差
- 2.3.4 不用
埃尔米特插值
- 例题, 三个点值+一个点的导数的计算
- 均差表绘制方式
分段低次插值: 知道概念即可
?
三次样条插值 不用
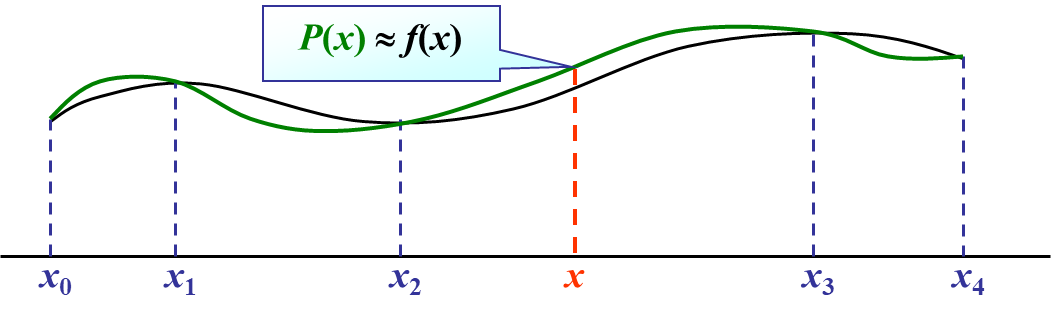
什么是插值法
当精确函数 y = f(x) 非常复杂或未知时,在一系列节点 处测得函数值,由此构造一个简单易算的近似函数 ,满足条件。这里的 P(x) 称为f(x) 的插值函数。
最常用的插值函数是多项式
插值多项式
为了使插值函数更方便在计算机上运算,一般插值函数都使用代数多项式和有理函数
代数插值多项式的存在唯一性
设函数在区间[a,b]上的代数插值多项式为
即多项式的系数满足线性方程组
上述方程组的系数行列式为n+1阶的Vandermond行列式 (是已知量)
定理: 满足 , 次数不超过n的插值多项式一定唯一存在
- 若多项式次数≠n, 则插值多项式不唯一 例如也是一个插值多项式,其中p(x)可以是任意多项式。
2.2 拉格朗日插值
2.2.1 线性插值&抛物线插值
插值的目的是求出n次多项式
线性插值
即n=1, 已知 求满足
由几何意义易得
抛物线插值
即n=2, … 略!
2.2.2 拉格朗日插值多项式
定义—n次插值基函数
若n次多项式在个节点上
满足条件,
则称这n+1个n次多项式为插值节点上的n次插值基函数
与上面的例子类似, 可以推导得出n次插值基函数为
- (分子只少了一项, 分母对应的少一项)
所以, 由的定义可知 满足插值多项式的定义
将形如上述的插值多项式称为拉格朗日(Lagrange)插值多项式
拉格朗日插值多项式基函数的简化写法
记, 可得 (导数乘法公式)
得
公式总结:
2.2.3 插值余项&误差估计
设区间[a, b]上f(x)的差值多项式为n阶的, 令余项
显然, 在插值节点上有
因此, 在[a, b]上有n+1个零点
设
此时有
….
得
拉格朗日型余项定理:
2.3 均差与牛顿插值多项式
2.3.1 插值多项式的逐次生成
Lagrange插值多项式的基函数为
当需要增加节点时, 所有基函数都需要重新计算
考虑使用一种逐次生成插值多项式的方法, 记为
对1次插值,
对2次插值,
可得,
其中计算得到
这样计算下去会变得很麻烦, 定义均差来表示他们
2.3.2 均差及其性质
差商(均差, devided difference)的定义:
是递归定义的
k+1阶差商只需要任选两个k阶差商相减, 并没有固定选择的要求
- 所以在上面选择了作为减数
均差的性质 ※
①k阶均差-f(x)的线性表示
②差商与x的顺序无关
- 如
③k阶差商与k阶导
当在包含节点的区间存在时,在之间必存在一点,使得
2.3.3 牛顿插值多项式
把后一式带入前一式得
由上面的式子可以得出, n阶插值多项式, 最高项系数一定为n阶差商
↑可以用来证明性质1(结合拉格朗日插值公式)
具体计算方式: 画出差商表
2.4 埃尔米特插值
埃米特插值: 不仅要求函数值相等, 还要求若干阶导数相等
埃尔米特插值: 要求插值函数 P (x) 满足
注意:
- N个条件可以确定N-1阶多项式
- 要求在1个节点处直到m阶导数都重合的插值多项式即为Taylor多项式
- 一般只考虑与的值。
Hermite插值计算出的多项式次数
给定n+1个点前面的插值函数最高只有n阶 (列出n+1个方程, 解得n个待定系数)
两点三次Hermite插值
考虑只有两个节点的插值问题
设在节点处的函数值为 在节点 处的的一阶导数值为
两个节点最高可以用次多项式
应满足插值条件
用四个基函数表示
可得
因为是3次多项式, 所以最高也为3次,
- 在处, , 即为的二重零点, 函数值为0, 导数也为0 可设
- 在处, , 代入得
代入得
类似可得
代入 得
两点三次Hermite插值的余项
两点三次Hermite插值的误差为
有$$\begin{cases} R_3(X_i) =f(x_i)-H_3(x_i)=0 \ R_3^{\prime}(X_i) =f{\prime}(x_i)-H{\prime}_3(x_i)=0 \end{cases} \qquad i=0,1$$
所以均为的二重零点, 可设
设辅助函数
则有
至少有5个零点 ()
用4次Rolle定理, 即可得, , 即
所以,两点三次Hermite插值的余项为
高次Hermite插值
作为多项式插值,三次已是较高的次数,次数再高就有可能发生Runge现象
因此,对有n+1节点的插值问题,我们可以使用分段两点三次Hermite插值
三点+一导数 插值
将导数的值算作两个点相近的一阶差商, 使用牛顿插值计算
例:求一个次数不高于3的多项式,使其满足 。
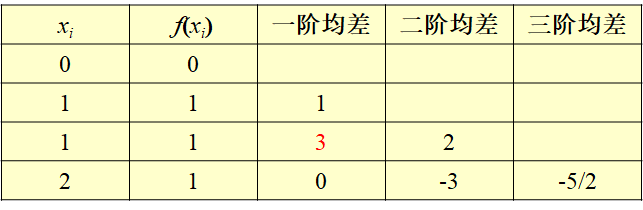
这里相当于设置了四个点0, 1, 1, 2, 其中一阶差商f[0,1], f[1,2]正常计算
对f[1, 1]
- 观察差商定义和导数定义
- 可以发现
2.5 分段低次插值
Runge现象
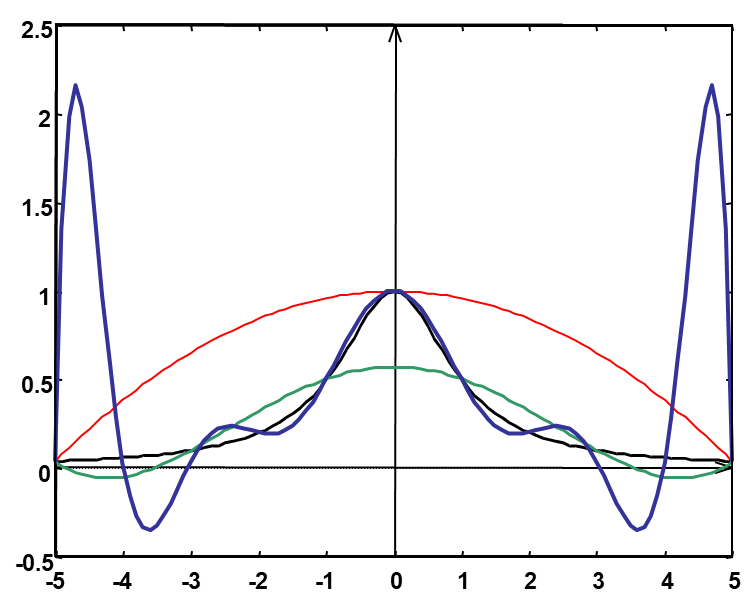
- n越大,端点附近抖动越大,称为Runge现象 ()
分段线性插值
在每个区间上,用1阶多项式 (直线) 逼近 f (x):
- 当取区间()小时, 逼近f(x)
- 但是失去了光滑性
分段Hermite插值
在’构造3次Hermite函数
- 导数一般不易得到。
第三章 不需要了
第4章 数值积分
概论
- 求积节点 求积系数概念
- 待定系数的确定
- 求积公式余项证明p102公式 梯形公式余项
Newton-Cotes公式
- 一阶二阶
- 稳定性 为什么不用这个公式
- 偶阶xxx
复合求积公式
- 复合梯形, 辛普森 及其余项
- p108 例题
龙贝格求积公式
龙贝格算法 (注意什么时候停止计算
p113 例6
4.5
- 自适应skip
- 高斯: 知道概念
- 高斯 lelangde公式
4.1 数值积分概论
4.1.1 数值积分基本思想
对于积分
如果知道的原函数, 则由牛顿-莱布尼茨公式有
但是在工程和科研中, 常出现以下问题
- 的解析式不存在, 只给出了的数值
- 的原函数求不出来, 如不是初等函数
- 表达式复杂, 很难求出
简单的积分近似计算方式:
- 求积节点一般是给定的, 我们的目标就是确定求积系数
4.1.2 插值多项式计算积分
积分的近似计算方法很多,但为方便起见,最常用的一种方法是利用插值多项式来构造数值求积公式,具体步骤如下:
在积分区间上取n+1个插值节点
的n次插值多项式:
用作为的近似, 此时积分的计算为
设求积系数则的积分
4.1.3 代数精度
定义 若求积公式
- 对任意次数不超过次 的代数多项式 都准确成立,即
- 但对次多项式却不能准确成立,即只要
- 则称该求积公式具有m次的代数精度
例: 求梯形公式的代数精度
例:对于上1次插值,有 考察其代数精度。
解:逐次检查公式是否精确成立
代入0次的代数多项式
代入1次
代入2次
4.2 Newton-Cotes数值求积分
4.2.1 NewTon-Cotes公式
牛顿–柯特斯公式
Newton-Cotes公式是指等距节点下使用Lagrange插值多项式建立的数值求积公式
设函数, ()
将积分区间分割成n等分, 各个节点为
使用Lagrange插值得:
- 其中
此时积分准确值
- 其中
令得,
- n阶Newton-Cotes求积公式:
- Newton-Cotes公式的余项:
Ak的计算与Cotes系数
- 称为Cotes系数
- Cotes 系数仅取决于 n和k,可查表得到。与 f (x) 及区间[a, b]均无关。
4.2.2 低阶Newton-Cotes公式及其余项
在Newton-Cotes公式中,n=1,2,4时的公式是最常用也最重要三个公式,称为低阶公式
梯形公式
梯形求积公式
梯形求积公式(两点公式):
梯形公式余项
- 梯形(trapezia)公式具有1次代数精度
Simpson公式
Simpson求积公式(三点公式, 抛物线公式):
Simpson公式的余项:
- Simpson公式具有3次代数精度
| 公式 | 余项 | 步长h | 余项 (用h表示) | 代数精度 | |
|---|---|---|---|---|---|
| n=1(梯形公式) | 1 | ||||
| n=2(Simpson公式) | 3 | ||||
| n = 3: Simpson’s 3/8-Rule | 3 | ||||
| n = 4: Cotes Rule | 5 |
定理:当n为偶数时,Newton-Cotes公式至少具有n+1次代数精度
证明:当n为偶数时, Newton-Cotes公式对的余项为0
4.2.3 Newton-Cotes公式的稳定性
对Cotes系数:
值只和积分区间的阶段划分有关, 与函数无关
因此用Newton-Cotes公式计算积分的舍入误差主要由函数值的计算引起
考虑的舍入误差对公式的影响
记精确值为,近似值为, 误差
则积分精确值和近似值误差为:
结论
Newton-Cotes公式的舍入误差只是函数值误差的**(b-a)倍**
即时, Newton-Cotes公式是稳定的
- 稳定: 指误差是否会在计算过程中显著增长
- 实际上, 当n<8时, 公式都是稳定的
若有正有负,有
此时,公式的稳定性将无法保证
- 因此,在实际应用中一般不使用高阶Newton-Cotes公式, 而是采用低阶复合求积法
4.3 复合求积公式
当积分区间长度较大, 节点数n+1固定时, 使用Newton-Cotes的误差较大
- 考虑提高n, 过高次数的插值, 公式的舍入误差很难控制
- Newton-Cotes公式在时不稳定
为了提高公式的精度,又使算法简单易行,往往使用复合方法
- 将分为若干小区间, 在小区间内使用低阶Newton-Cotes, 最后累加
高次插值有Runge 现象,故采用分段低次插值 → 分段低次合成的 Newton-Cotes 复合求积公式。
4.3.1 复合梯形公式
分割:
在第k个区间()上用梯形公式, 然后累加:
- 头, 末尾()加1次, 其他节点被加两次

4.3.2 复合Simpson公式
复合Simpson公式:
- 因为simpson最少需要三个插值点, 在之间插入一个点
- n=2→n=3, 并不会增加过多的误差
神奇的分数下标
- n=2→n=3, 并不会增加过多的误差
 $x_k$被加两次→$2f(x_k)$, $x_{k+\frac{1}{2}}$不会重复加→$4f(x_{k+\frac12})$
$x_k$被加两次→$2f(x_k)$, $x_{k+\frac{1}{2}}$不会重复加→$4f(x_{k+\frac12})$
得
例: 使用各种复合求积公式计算定积分
为简单起见,依次使用8阶复合梯形公式、4阶复合Simpson公式和2阶复合Cotes公式
可得各节点的值如表
| Trapz | Simpson | Cotes | ||
|---|---|---|---|---|
| 0 | 1 | |||
| 0.125 | 0.99739787 | |||
| 0.25 | 0.98961584 | |||
| 0.375 | 0.97672674 | |||
| 0.5 | 0.95885108 | |||
| 0.625 | 0.93615564 | |||
| 0.75 | 0.90885168 | |||
| 0.875 | 0.87719257 | |||
| 1 | 0.841470981 |
- 但是误差和收敛速度还需要考虑
4.3.3 复合求积公式的余项和收敛的阶
余项
| 求积公式 | 单纯求积公式的余项 | 复合求积公式的余项 | |
|---|---|---|---|
- 复合求积公式的误差就是将小区间(长度为步长h)的误差逐个累加
收敛阶
定义: 若一个积分公式的误差满足 则称该公式是 阶收敛的。
例: 计算




例2: 给定精度, 如何取n ( 要求, 如何判断n=?)
上例中若要求
即:取 通常采取将区间不断对分的方法,即取
上例中
4.4 龙贝格求积公式
复合梯形公式:
在复合梯形公式的基础上, 将[a, b]分隔成2n等份, 且不变
即多出来下标为的点
- 在已经计算出基础上, 如果精度不够, 就可以加n个点递归计算, 提高精度
新步长
递推公式
上式称为递推的梯形公式
外推加速公式
复合梯形公式余项:
- 可知, 的精度>
龙贝格公式(算法)
用上前面的新步长:
- 既然有, 那么肯定有
同理, 对Simpson公式
…
加速公式总结为:
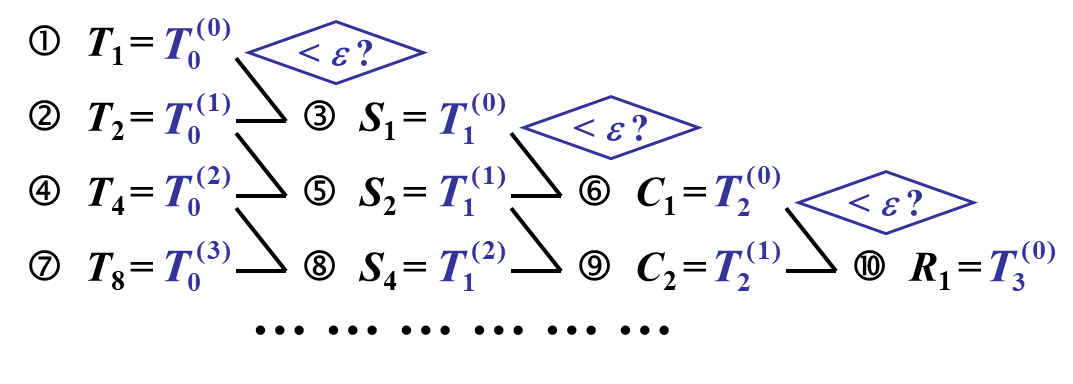
- Romberg算法的代数精度为m的两倍
- Romberg算法的收敛阶高达m+1的两倍
4.5 高斯求积
只讲概念: 什么是高斯求积公式, 什么是高斯求积公式的的节点
构造具有2次代数精度的求积公式
将节点 以及系数 都作为待定系数。令 代入可求解,得到的公式具有2n+1 次代数精度。这样的节点称为Gauss点,公式称为Gauss 型求积公式。
高斯-勒让德求积公式
Legendre 多项式族 : 定 义 在 [ - 1, 1] 上 , 满足:
由有 递 推
以的根为节点的求积公式称为高斯-勒让德公式
第5章 解线性方程组的直接方法
5.1
- 5.1.2 skip
5.2
note: 5.2是分解法的推导过程, 5.3是公式(但是公式背不了一点)
- 高斯消去法
- 矩阵三角分解(LU分解) (推导过程)
- 列主元消去
5.3
矩阵三角分解的公式
- 做题用算法/公式无所谓
- p153/3.2 3.3 公式不一定要背 会做就行
skip: 选主元三角分解法; 平方根分解法; 追赶法;
5.4
- 矩阵范数–各种算子范数计算
- 定理19 核半径
5.5
- 什么是病态良态, 计算
- 条件数, 计算
end
5.2 高斯消去法
5.2.1 消元与回代计算
对于线性方程组 表示为Ax=b, A=\matrix{a_{11} &a_{12}&...&a_{1m}\\a_{21}&a_{22}&...&a_{2m}\\...\\a_{n1}&a_{n_2}&...&a_{nm}}
若(行列式)对其增广矩阵施行行初等变换
经过n-1步消除列元素得
可知
因此,上三角形方程组有唯一解
因此可得线性方程组的解:
定理: 若A的所有顺序主子式均不为0,则高斯消元无需换行即可进行到底,得到唯一解。
增广矩阵通常用于判断矩阵的有解的情况,比如说秩(A)<秩(A|B) 方程无解; 秩(A)=秩(A|B) =n方程有唯一解; 秩(A)=秩(A|B) <n方程有无穷多解; 秩(A)>秩(A|B)不可能。
5.2.2 矩阵的三角分解
Doolittle分解法和Crout分解法
LU分解法 : 用矩阵描述高斯消去法的过程
矩阵A的LU分解法定义: 不带行交换的Gauss 消去法的消元过程,产生一个单位下三角矩阵L和一个上三角矩阵U,即
- 其中U的第一行等于矩阵A的第一行
- L的第一列
- 其他元素通过矩阵乘法 (解方程)计算 出来
定理: 若A的所有顺序主子式均不为0,则 A 的 LU 分解唯一(其中 L 为单位下三角阵)。
对于杜立特分解: 固定i: 有
得
5.2.3 列主元消去法
在使用高斯消去法时, 每次确定行时, 加上交换行的操作
换行: 选择绝对值最大的列元素,换到上面
5.3 矩阵三角分解法
5.3.1 直接分解法
直接法是将原方程组化为一个或若干个三角形方程组的方法,共有若干种
直接三角分解法
杜立特分解法
- 其中U的第一行等于矩阵A的第一行
- L的第一列
- 其他元素通过矩阵乘法 (解方程)计算 出来
5.4 向量和矩阵范数
5.4.1 向量和矩阵的范数
向量范数
定义1 对于维向量空间 中任意一个向量 , 若存在唯一一个实数 与对应,且满足
- (正定性),且
- (齐次性),
- (三角不等式)
- 则称 为向量的范数
在向量空间中, , 常用的向量x的范数
x的2-范数或欧氏范数:
x的1-范数:
x的∞范数(最大范数):
x的p-范数:
定义 向量序列收敛于向量是指对每一个, 都有。
- 可以理解为
矩阵范数
定义: 空间的矩阵范数 对任意 满足以下条件
- 正定性:
- 齐次性:
- 三角不等式 :
- 相容 当 m = n 时,
算子范数:
特别有:
- 行和范数: (最大的 行之和)
- 列和范数: (最大的 列之和)
- 2-范数: (矩阵的最大特征值)
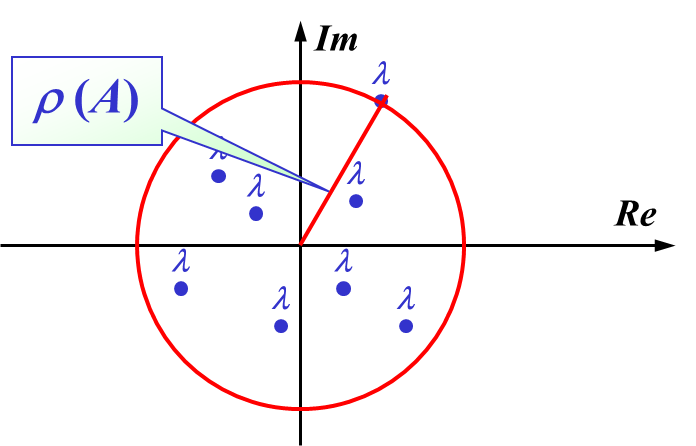
谱半径
定义 矩阵A的谱半径记为,其中 为A的特征根
5.5 线性方程组的误差分析
是关键的误差放大因子, 称为A的条件数, 即为
- 越大, A越病态, 难以求得准确解
根据算子范数的不同, 条件数也不同
条件数的性质
- A可逆, 则
- A可逆, ,则
- A正交, 则
- A可逆, R正交, 则
注:一般判断矩阵是否病态,并不计算,而由经验得出。
- 行列式很大或很小(如某些行、列近似相关);
- 元素间相差大数量级,且无规则;
- 主元消去过程中出现小主元;
- 特征值相差大数量级。
第6章 解线性方程组的迭代法
6.1
- 什么是迭代 发散
- 序列极限
- 一些定理结论 不证明
6.2
- 雅可比 高斯-塞德尔迭代
- 定理9(1) ; (2), 定理10不用
- 超松弛skip
end
6.1 引言
在用直接法解线性方程组时要对系数矩阵不断变换
如果方程组的阶数很高,则运算量将会很大, 并且大量占用计算机资源
因此对线性方程组, 要求找寻更经济、适用的数值解法
设
可以将线性方程组变换为, 其中
- B称为迭代矩阵, f为常数项
- 显然上面两式同解,我们称两个方程组等价
对第二个线性方程组,采用以下步骤:
取初始向量 ,代入,可得
依此类推
这种方式就称为迭代法 ,以上过程称为迭代过程
迭代法产生一个序列
如果其极限存在,即, 则称迭代法收敛,否则称为发散
迭代法收敛的充分条件
设有线性方程组 以及一阶定常迭代法
如果有迭代矩阵B的某种算子范数, 则
迭代法收敛,即对任取均有, 且
6.2 雅可比迭代法与高斯-塞德尔迭代法
雅可比迭代法
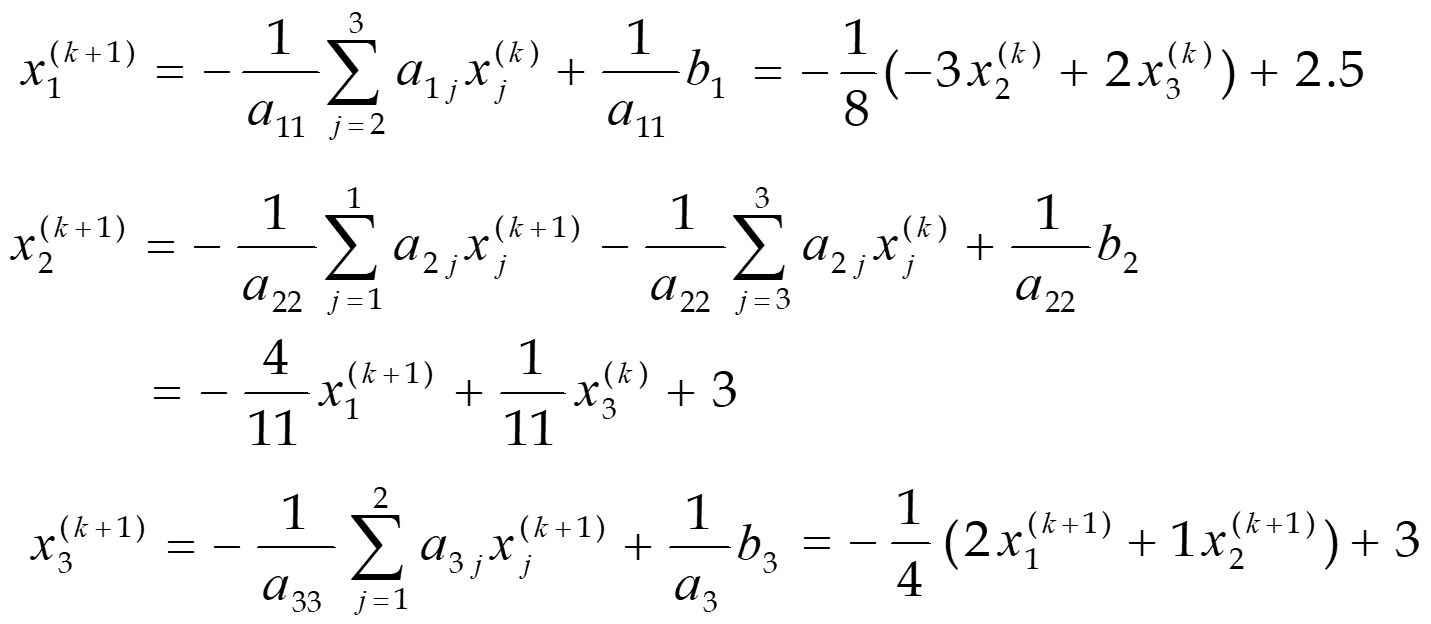
设线性方程组的一般形式为
设则可从上式解出
令, 为方程组系数矩阵A的对角线
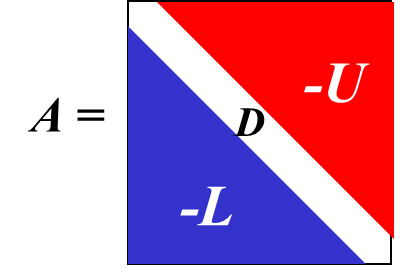
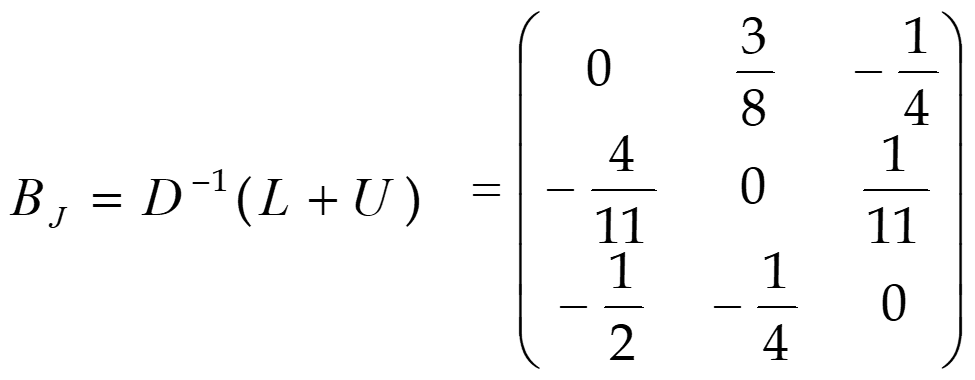
故迭代过程化为,
令,于是
等价线性方程组为, 即
- 称上式为解线性方程组的Jacobi迭代法(J法), 矩阵为迭代法的迭代矩阵
Gauss-Seidel迭代法
雅可比迭代法中描述的都是向量, 每轮迭代时还要从的中逐个计算
- 我们知道的误差会比更小
- 在每轮迭代时, 对, 它前面的都计算出来了, 可以将它用上
- 红色部分用了来更精确的进行计算
转换为矩阵形式
- B: Gauss-Seidel 迭代阵
Jacobi迭代法和Gauss-Seidel迭代法统称为简单迭代法
例题:
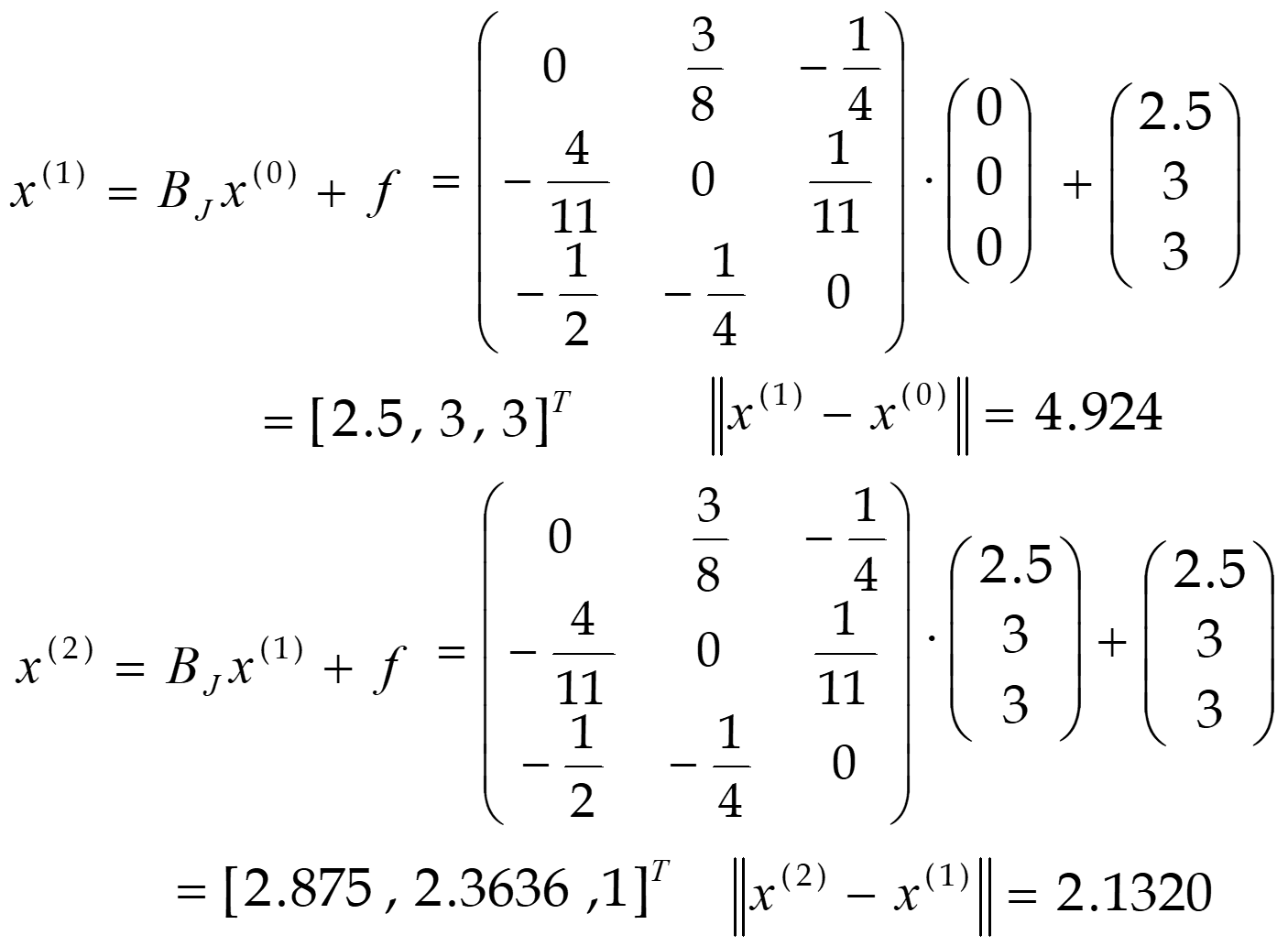
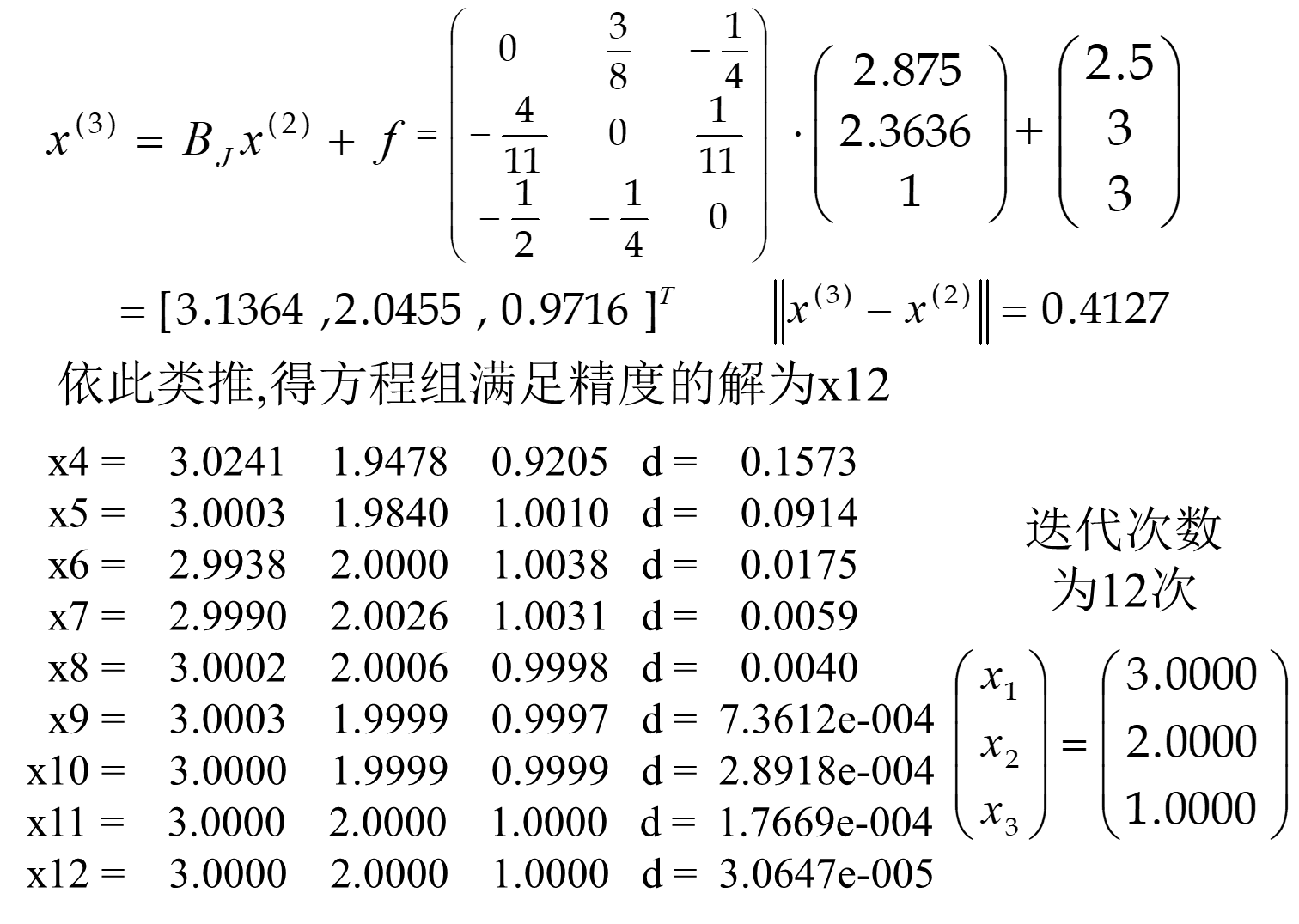
用Jacobi迭代法求解方程组,误差不超过1e-4
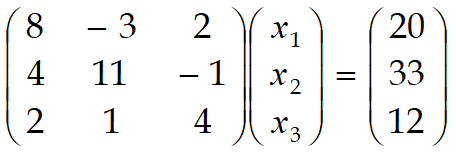

取初值,使用Jacobi迭代法
用Guass-Seidel迭代法, 选择相同初值
通过迭代,至第7步得到满足精度的解x7
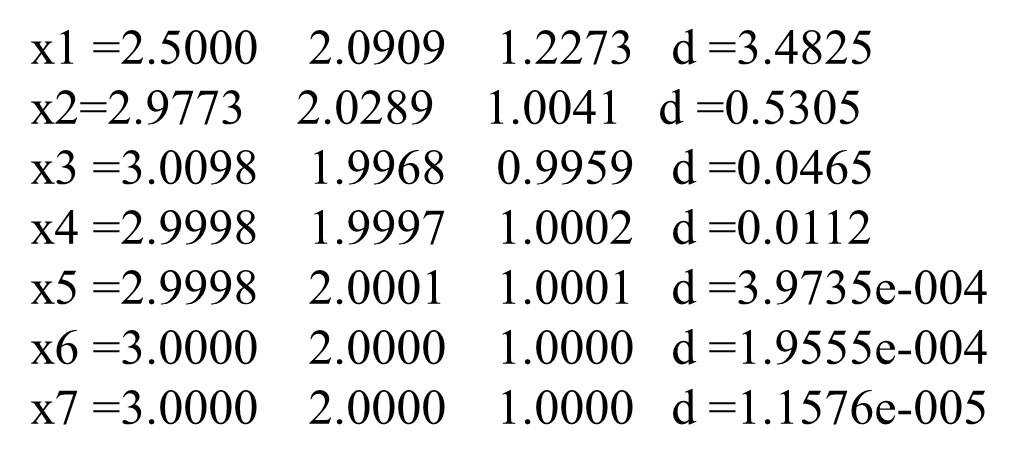
- 可以看出,Gauss-Seidel迭代法的收敛速度比Jacobi迭代法要高
迭代法的收敛性
设解线性方程组的迭代格式: (第k次迭代)
而方程组精确解, 有
两式相减得:
令, 则
- , 是一个非零常数向量, (是选取的初值)
- 当然, 如果, 说明恰好选到了精确值, 是特殊情况
因此迭代法收敛的充要条件为
定理1: 迭代格式收敛的充要条件为
定理2: 迭代格式收敛的充要条件为谱半径
- 根据矩阵与其Jordan标准形及特征值的关系,可知
又因为矩阵的谱半径不超过其任一种算子范数,即 , 可得
定理 (充分条件) 若存在一个矩阵范数使得, 则迭代收敛,且有下列误差估计:
证明:
&\begin{aligned}①\vec{x}^*-\vec{x}^{(k)}&=B(\vec{x}^*-\vec{x}^{(k-1)})\\&=B(\vec{x}^*-\overline{x}^{(k)}+\vec{x}^{(k)}-\vec{x}^{(k-1)})\\\Rightarrow\parallel\vec{x}^*-\vec{x}^{(k)}\parallel&\leq q(\parallel\vec{x}^*-\vec{x}^{(k)}\parallel+\parallel\vec{x}^{(k)}-\vec{x}^{(k-1)}\parallel)\quad\checkmark\end{aligned}
例: 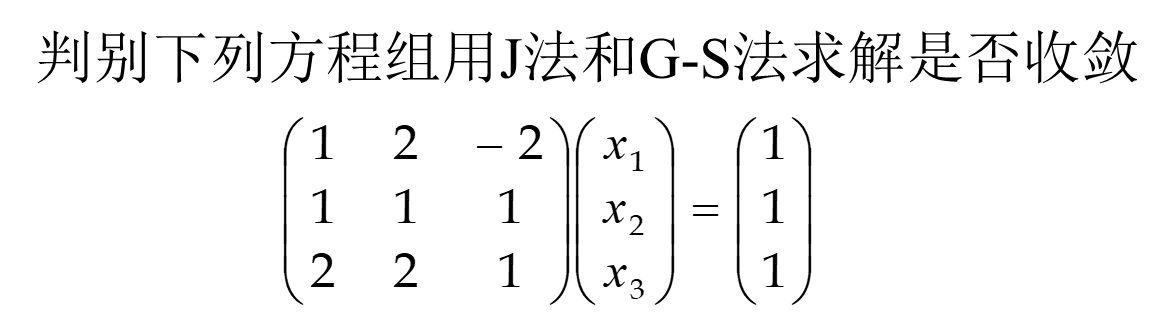
(1) 求Jacobi法的迭代矩阵
- 显然, 的常用算子范数, 不能用范数, 只能用特征值来判断
- 所以, Jacobi迭代法收敛
(2) 求Gauss-Seidel法的迭代矩阵
- , 所以Gauss-Seidel迭代法发散
Gauss-Seidel迭代法收敛速度快, 但是有可能发散, 并不一定优于Jacobi迭代法
另外,给出系数矩阵对角占优线性方程组的一个结论
定理: 若线性方程组的系数矩阵为严格对角占优矩阵,则Jacobi法和法均收敛
矩阵严格对角占优: 对角线上的值比行上的其他值加起来都大
- 可得
对于Jacobi迭代法,其迭代矩阵为
- , 所以Jacobi迭代法收敛
对于G—S迭代法,其迭代矩阵为, 的形式不像那样好确定, 不用范数, 使用特征值判断
第7章 非线性方程与方程组的数值解法
7,1
- 二分法和误差
7.2
- 不动点概念和公式
- 不动点收敛性
- 局部收敛
- 收敛的阶
7.3 skip
7.4 牛顿
- 简化牛顿 牛顿下山skip
- 重根情形
7.1 方程求根与二分法
7.1.1 多项式基础
略, 高数
7.1.2 二分法
零点定理: 若,且 f (a) · f (b) < 0,则 f 在 (a, b) 上必有一根。
算法描述
设[a,b]为单根区间
取中点
若, 记为中的根
若, 则为有根区间, 令
若, 则为有根区间, 令
一轮操作后, 有根区间缩小为一半
循环, 继续取的中点, 得到新区间
以此类推, 有
对于每个小区间都有
确定适当的n, 可以得到任意要求的精度 ()
误差分析
对于第0步的有误差
第k步的误差:
对于给定的精度ε,可估计二分法所需的步数 k :
特点
优点
- 简单;
- 对f (x) 要求不高(只要连续即可)
缺点
- 无法求复根及偶重根
- 收敛慢
注:用二分法求根,最好先给出 草图以确定根的大概位置。或用搜索程序,将[a, b]分为若干小区间,对每一个满足的区间调用二分法程序,可找出区间[a, b]内的多个根,且不必要求。
例
例 证明1-x-sin 在[0,1]内仅有一个根,使用二分法求误差不大于的根需要对分多少次?
解:
- 设,则,f,且在上[0,1]上连续,故方程在[0,1]内至少有一根
- 又因为,故在[0,1]上单调递减,因此在[0,1]上有且仅有一个根
- 使用二分法,使误差限,解得
所以对分14次即可
7.2 迭代法及其收敛性
不动点迭代法
将非线性方程化为一个同解方程, 且设连续
任取初值代入, 得
称上式为求解非线性方程的不动点迭代法
- 称为迭代函数, 为第k步迭代值
- 若存在, 则为的不动点, 也就是方程f=0的根
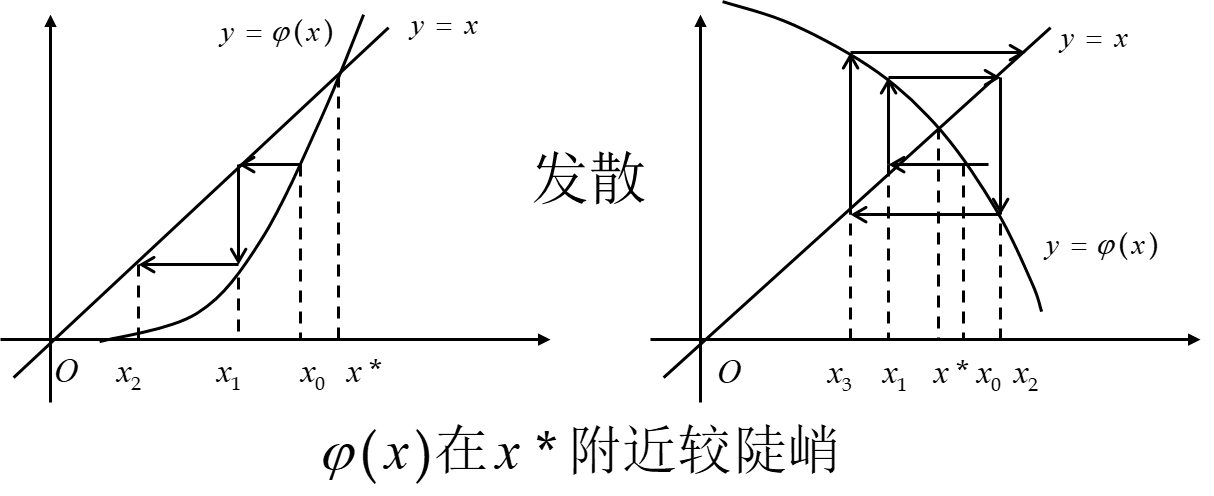
发散与收敛
若存在一点, 使得迭代序列满足则称迭代法收敛,否则称为发散
如果将原方程表示为与原方程同解
例题: 用迭代法求解方程
将原方程化为等价方程
- 取, 得, 显然发散
如果将原方程化为等价方程
得
收敛, 原方程的解为
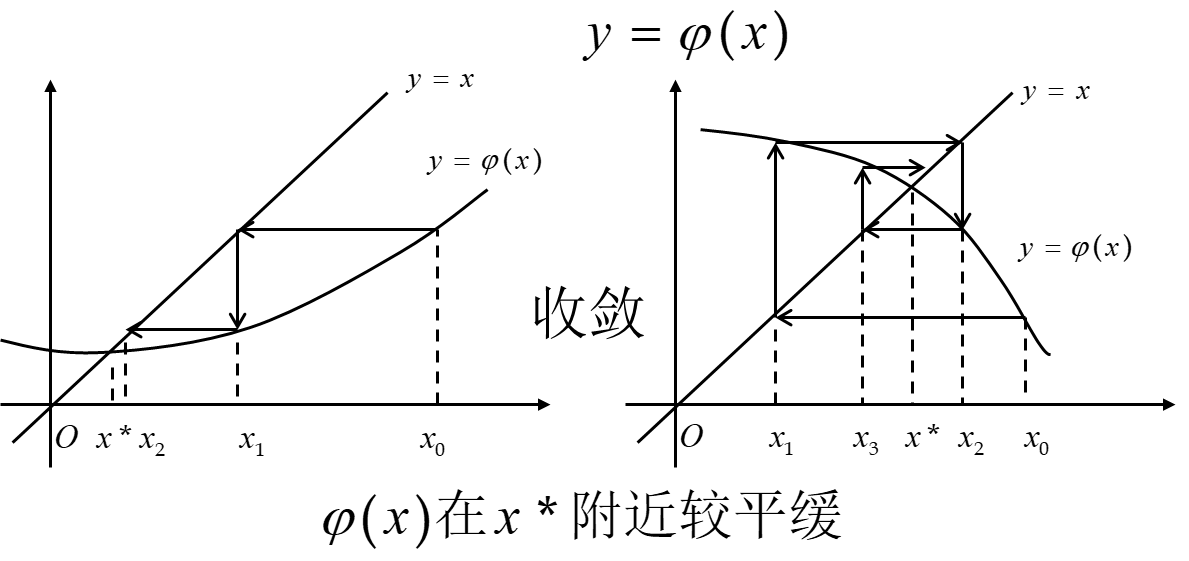
迭代法收敛定理
定理: 设迭代函数在[a,b]上连续, 且满足
- 当时,
- 存在一个整数L, 满足且, 有(上确界为L)
则有以下结论
- 方程在内有唯一解
- 对于任意初值, 迭代法均收敛于
-
定理证明:
结论1: 方程在内有唯一解
- ①构造了一个的正方形空间, 对角线;
- ②对于两个函数交点:, , 单调递减
- 零点定理得在有唯一零点
结论2: 对于任意初值, 迭代法均收敛于
- 对, 由微分中值定理和得
结论3&4: 和
另一种方式证明收敛: 由于L<1,
由定理可知, 只要迭代函数满足, 迭代法收敛
- 注: 虽然收敛, 但不一定是唯一根
对于实际要求中的误差限, 只要
- 所以当时, 即可停止迭代, 将作为近似解
收敛的阶
由定理1的结论可以看出,L或在[a, b]上越小, 迭代法收敛越快
设
定义: 若存在实数和满足(同阶无穷小), 则称迭代法p阶收敛
- 当p=1称为线性收敛, p>1时称为超 线性收敛, p=2时称为平方收敛
收敛阶的计算
若在精确解处处可导, 泰勒展开得:
- , 即迭代法的收敛阶是p
定理: 如果迭代法迭代函数 在根附近满足:
- 存在阶导数处连续;
- ,而
则迭代法的收敛阶是
7.4 牛顿法
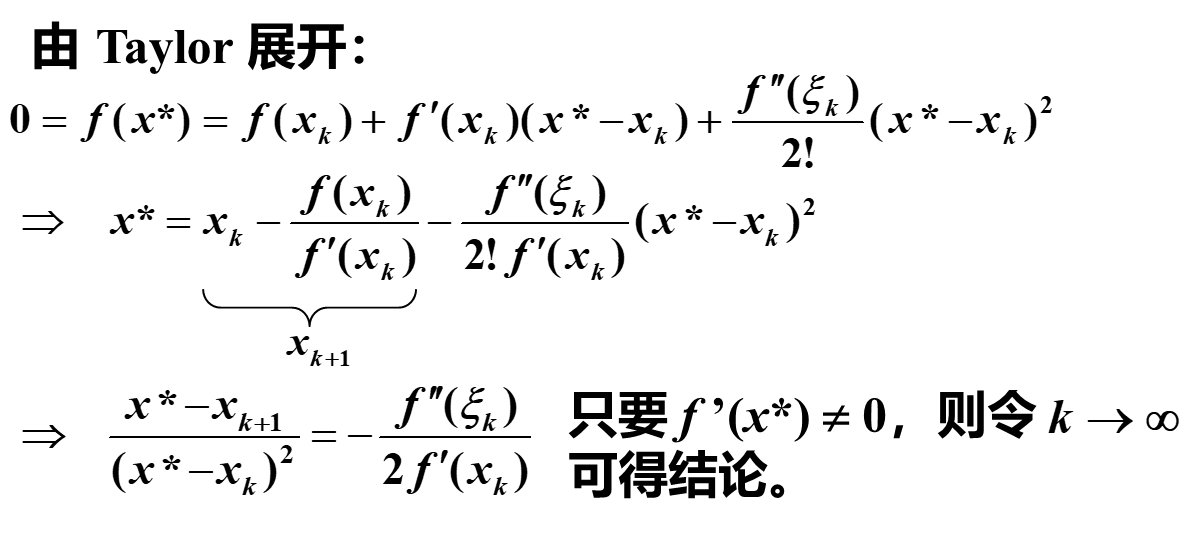
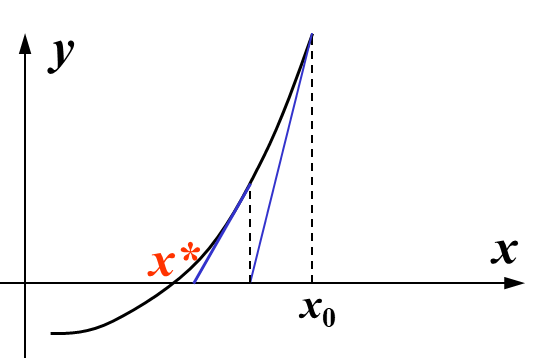
原理:将非线性方程线性化 —— Taylor 展开 /Taylor’s expansion/
取, 将f(x)在x0处做一阶泰勒展开,得
将将 看成高阶小量,则有:
(去掉了f''项, 所以约等于)
: 
推导过程
如果将非线性方程化为等价方程 , 且
求k(x)
令
设为f(x)=0的根, 在附近越小,则收敛速度越快 (f(x)对x的影响大)
如果, 令(收敛速度最大), 即,
取, 则
取初值, 由上面k(x)构造迭代函数得
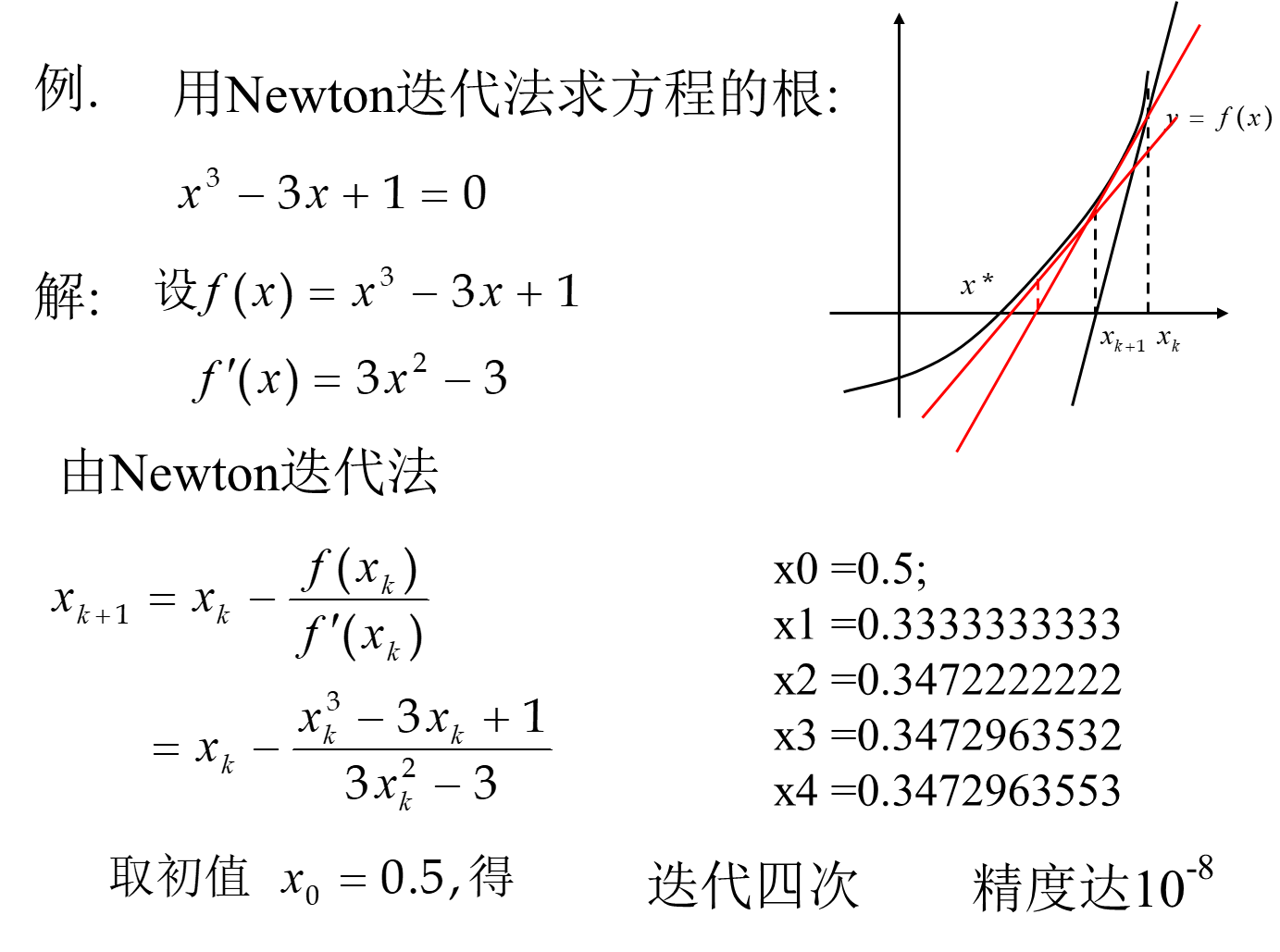
牛顿迭代法:
- 具有局部收敛性, 只要, 牛顿迭代法至少平方收敛
例1: 用Newton迭代法求方程的根:
例: 为线性收敛
- 因为是方程的m重根, 且
- 得
-
- 由定义可知, 该迭代法对m(>=2)重根是线性收敛的
例: 设, 且证明, 至少是平方收敛
- 令
- 则
- 所以,该迭代法至少平方收敛
收敛的充分条件
设若
- (区间端点异号, 有根)
- 在整个区间上, 不变号, 且 (根唯一)
- 选取使得 (产生的序列单调有界, 保证收敛)
则牛顿迭代法产生的序列收敛到在区间内的唯一根
局部收敛性
设 ,若 x* 为 f (x) 在[a, b]上的单根,且 ,则存在 x* 的邻域使得任取初值 ,Newton’s Method产生的序列收敛到x*,且满足
例: 证明牛顿迭代法实际上是一种特殊的不动点迭代 其中 则