
10-414 深度学习系统课程笔记
笔记内容由课程ppt+llm生成, 并进行一定修改
Lec2 机器学习回顾/Softmax回归
2.1 机器学习基础
数据驱动编程范式
- 传统编程困境:手工编写分类逻辑困难(如手写数字识别)
- 监督学习解决方案:
- 收集带标签的训练集
- 通过机器学习算法自动生成分类程序
机器学习三要素
- 假设类 (Hypothesis Class) : 参数化映射函数 ,描述输入到输出的关系
- 损失函数 (Loss Function) : 量化模型预测效果:
- 优化方法 (Optimization Method) : 最小化经验风险
2.2 Softmax回归示例
多类分类问题设定
- 输入空间: (如MNIST图像 )
- 输出空间: (如MNIST有 类)
- 训练集规模: 个样本(如MNIST )
线性假设函数
其中
- 参数矩阵 , 输入参数x为n维列向量(n×1)
- 将输入的n维列向量映射为k维输出(如每个类别的概率)
批量计算形式:
- 意为强调这个向量占一行 这样, 线性假设可以用批量计算形式写成:
损失函数设计
- 分类错误率(不可导,不适于优化):
- 交叉熵损失(Softmax损失):
- 注: 这里的log默认为e为底, 即ln
2.3 优化方法
梯度下降算法
对于函数, 梯度定义为
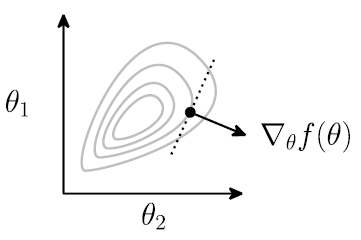
- 在θ点处的梯度表示在局部上, 哪个方向能使函数增长最快 为了最小化函数(如损失函数), 梯度下降算法使用负梯度方向, 逐步逼近最小值
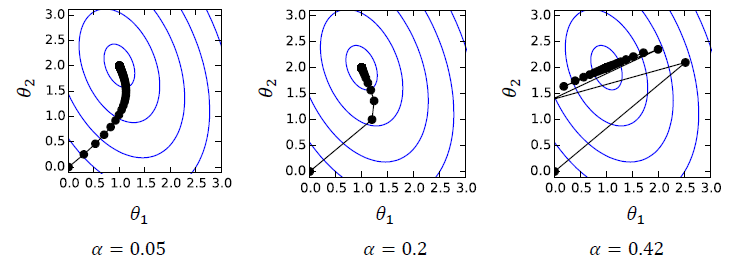
- α为步长/学习率, α的大小对收敛性/收敛速度有很大影响
参数更新规则:
随机梯度下降 (SGD)
每次都使用所有数据来计算梯度开销过大, 可以使用采样构成一个minibatch, 将这个minibatch计算的结果作为真实梯度的近似
- 这个近似操作可以理解为引入一些"噪声", 这在某些情况下甚至能带来一些优势
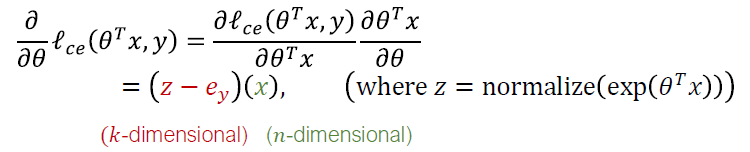
softmax的梯度
对向量:
- log实际上是ln
- 用向量形式表示:
回到softmax: , θ是n×k的矩阵, 是k维列向量, 如何计算矩阵/向量的导数和链式法则?
- 假装一切都是标量(无视转置), 使用链式法则, 然后重新排列 / 转置矩阵or向量, 让计算结果的维度大小正确
 用批量计算形式 重复, 直到参数/loss收敛
用批量计算形式 重复, 直到参数/loss收敛
- Iterative over minibatches of training set
- Update the parameters
Lec3 手动构建神经网络
3.1 从线性到非线性假设类
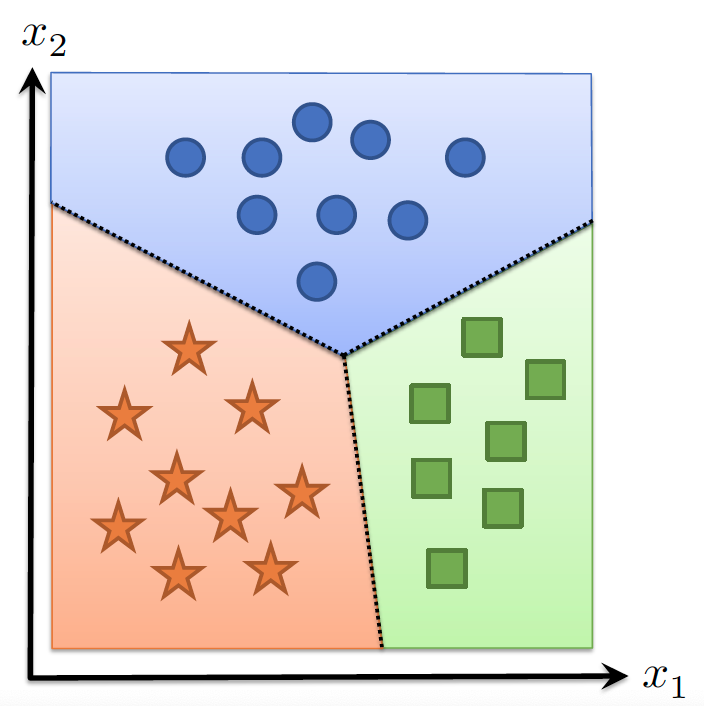
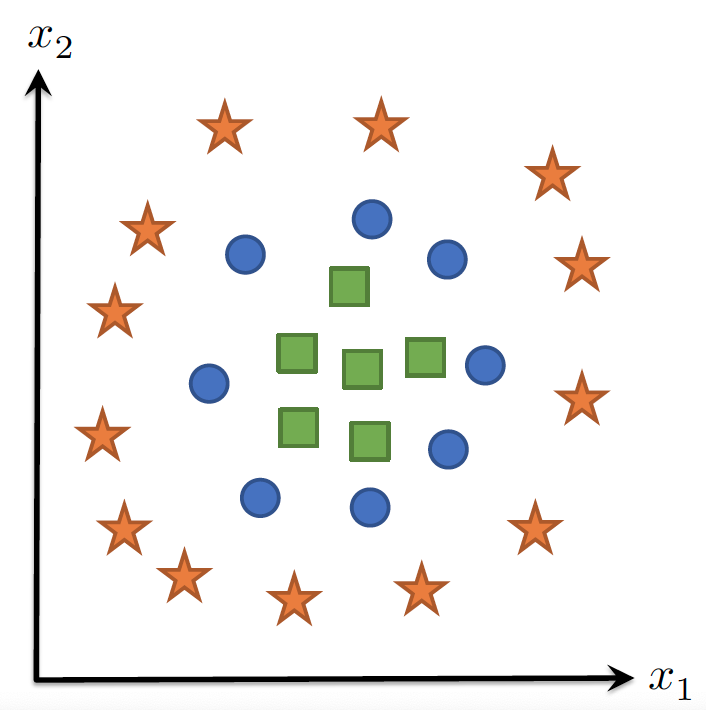
线性分类器的局限性
- 线性假设类基本形式:
- 通过k个线性函数划分输入空间
- 无法处理非线性分类边界(如螺旋形数据)
非线性特征
核心思想
- 通过特征映射提升维度:
特征构造方法对比
| 方法 | 描述 | 数学形式 | 局限性 |
|---|---|---|---|
| 线性特征 | 简单线性组合 | 等价于单层线性分类器 | |
| 非线性特征 | 激活函数变换 | 可表达复杂边界 |
关键非线性变换示例
- 随机傅里叶特征:
- 可学习非线性特征:(需通过反向传播训练)
3.2 神经网络
基本定义
- 神经网络:由多个可微参数化函数(层)组成的假设类
- 深度网络:多层级联的非线性变换(现代网络通常>3层)
神经网络结构
两层神经网络
也称为单隐藏层网络
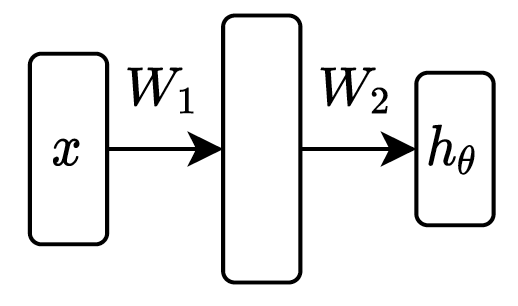
- 批量矩阵形式:
多层感知机(MLP)
- 维度关系:
- Z被称为layer, activation, neuron, 是网络在不同阶段生成的中间特征
- 典型激活函数:ReLU, Sigmoid, Tanh
深度网络优势分析
| 观点 | 支持/反对 | 说明 |
|---|---|---|
| 生物相似性 | ❌ | 实际与大脑工作机制差异显著 |
| 电路效率 | ⚠️ | 理论优势难以实际验证 |
| 经验有效性 | ✅ | 固定参数量下表现更优 |
3.3 反向传播
梯度计算框架
- 优化目标:
- 核心需求:计算
两层网络梯度推导
批量矩阵形式:
对于简单的两层网络, 梯度用批量矩阵形式写为:
对的梯度
- 为one-hot标签矩阵
对的梯度
- 表示逐元素乘法(标量乘法)
- 为激活函数导数
通用反向传播算法
尽管用了简化, 但是计算梯度还是有些麻烦
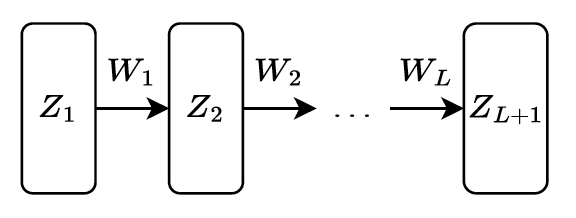
推导过程
前向传播递推式:
- 注意: 前面个的两层网络的最后一层没有激活函数, 和此处不相同
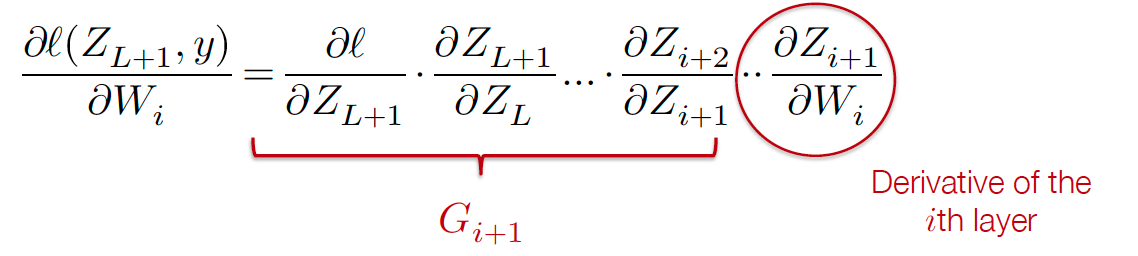
前向传播最终输出损失函数对于的梯度, 由链式法则可得: 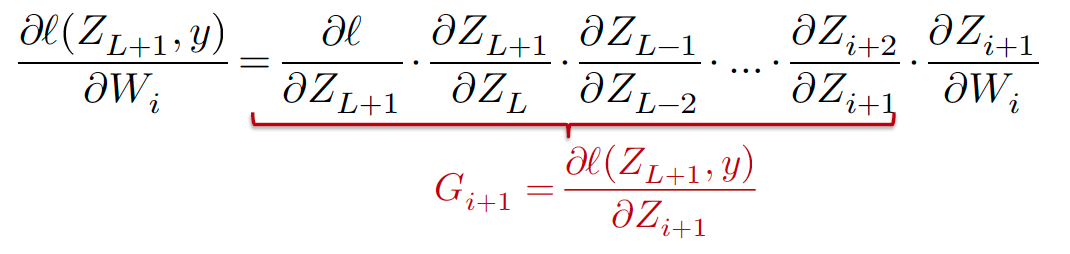
- 为损失对中间输出的导数 可得
回到参数的梯度更新:
前向传播
反向传播
- 初始化梯度:
- 反向迭代:
- 参数梯度计算:
计算图视角
- 向量-雅可比积vector Jacobian product:核心计算单元
- 内存优化:缓存前向传播结果
关键公式总结
| 公式类型 | 表达式 |
|---|---|
| 前向传播 | |
| 损失梯度 | |
| 反向梯度 | |
| 权重梯度 |
Lec4 自动微分
本讲内容分为两个主要部分:
- 不同微分方法的总体介绍
- 反向模式自动微分
4.0 微分在机器学习中的应用
每个机器学习算法都由三个不同的元素组成:
- 假设类:
- 损失函数:
- 优化方法:
计算损失函数对假设类参数的梯度是机器学习中最常见的操作。
4.1 手动微分
数值微分
基于定义的直接计算: 更准确的数值近似方法:
- 数值微分存在数值误差,计算效率较低(要计算两次f())。
- 但它是检验自动微分算法实现的有力工具,特别是在单元测试中。 数值梯度检查: 从单位球中选取 ,检验以下不变性:
符号微分
通过写下公式,利用 和规则、积规则和链式法则推导梯度。
- 和规则:
- 积规则:
- 链式法则: 但简单地这样做可能导致计算浪费。对于函数 ,计算所有偏导数需要 次乘法操作,效率较低。
4.2 自动微分
计算图
以函数 为例:
前向计算轨迹
前向模式自动微分 (Forward AD)
定义 ,然后按照计算图的前向拓扑顺序迭代计算 :
前向 AD 轨迹:
- 最终得到
- 本质上就是计算链式法则过程的中间结果
前向模式 AD 的局限性
对于函数 ,我们需要 次前向 AD 传递来获取相对于每个输入的梯度。在机器学习中,我们通常关注 但 很大的情况,这使得前向模式 AD 效率低下。
反向模式自动微分 (Reverse AD)
定义伴随值adjoint ,然后按照计算图的反向拓扑顺序迭代计算 :
- 伴随值就可以用来更新参数权重
反向 AD 评估轨迹
多路径情况的推导
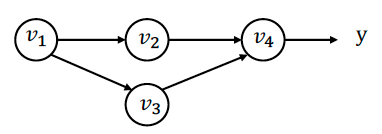 当节点在多个路径中使用时(如 在 和 路径中使用):
当节点在多个路径中使用时(如 在 和 路径中使用):
定义"部分伴随值" 用于每对输入-输出节点,则:
- so, 我们可以分别计算下游节点->上游节点的多有部分伴随值,然后将它们相加, 然后得到上游变量的伴随值。
反向 AD 算法
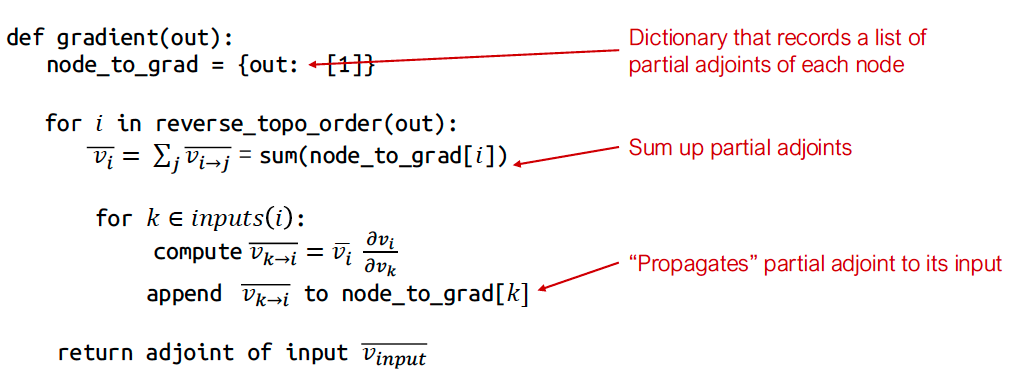
通过扩展计算图实现反向模式 AD
反向模式 AD 可以通过构建一个计算图来计算伴随值实现。这个过程中,我们扩展原始计算图(算法中的append Vktoj to node_to_grad[k]),添加用于计算伴随值的节点。 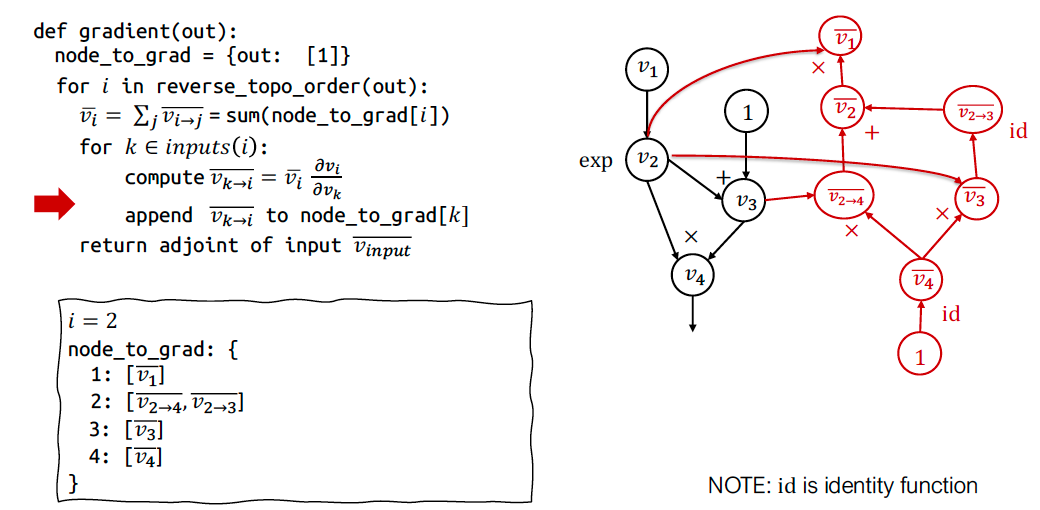
反向模式 AD 与反向传播的比较
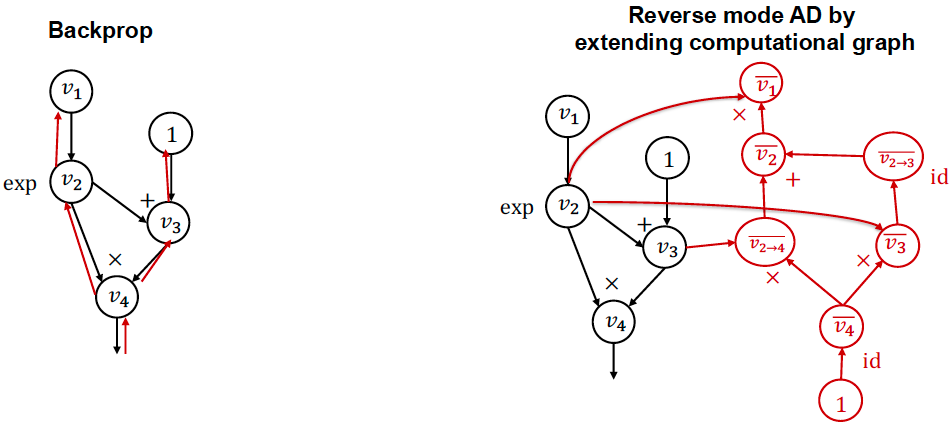
反向传播:
- 在相同的前向图上运行反向操作
- 用于第一代深度学习框架(如 caffe, cuda-convnet)
扩展计算图的反向模式 AD:
- 为伴随值构造单独的图节点, 可以对反向传播过程进行专门的优化
- 用于现代深度学习框架
张量上的反向模式 AD
对于张量值,定义伴随张量 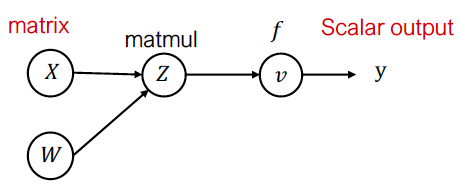 例如,对于矩阵乘法 ,:
例如,对于矩阵乘法 ,:
标量形式的反向评估:
矩阵形式:
梯度的梯度
反向模式 AD 的结果仍然是计算图。我们可以通过组合更多操作来进一步扩展该图,并在梯度上再次运行反向模式 AD。
数据结构上的反向模式 AD
对于数据结构,我们也可以定义相应的伴随数据结构。 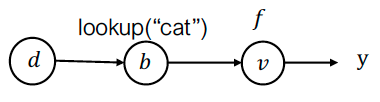 例如,对于字典定义:
例如,对于字典定义: 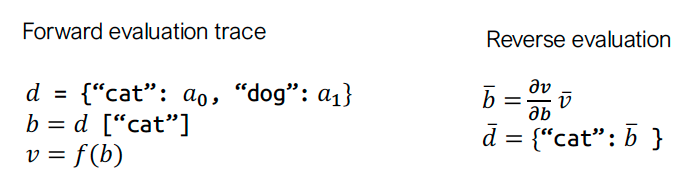
关键思想:定义与前向值相同数据类型的"伴随值"和伴随传播规则,然后应用相同的算法。
Lec6 全连接网络、优化与初始化
6.1 全连接网络(Fully Connected Networks)
多层感知机(MLP)的数学定义
L 层全连接网络(又称 MLP)的迭代公式:
- 参数集:
- :非线性激活函数,通常最后一层 。
矩阵形式与广播(Broadcasting)
考虑到 batch 大小 时的矩阵形式:
- 其中 ,。
- 实践中不真正构造 ,而是利用「广播」机制:
- 将 向量按列复制 次,不额外复制数据。
- 这样, 这个式子可以简写为 (在矩阵加法时自动应用广播)
训练前必须回答的关键问题
- 如何选网络的宽度和深度?
- 如何优化目标函数?(SGD 是答案之一,但实践中常用改进版本)
- 如何初始化权重?
- 如何确保网络在多次迭代后仍易于训练?
这些问题会相互影响, 且没有特定的回答
但对于dl, 他们最终服务于场景, 之后会介绍一些基本原则
6.2 优化算法(Optimization)
梯度下降(Gradient Descent)
通用更新规则:
- :步长(学习率), t: 迭代次数
- 局部最快下降方向,但大尺度可能出现震荡。
牛顿法(Newton’s Method)
利用 Hessian 矩阵 :
特点:
- 对二次函数一次迭代即可收敛()。
- 深度学习中不实用:① 求逆 Hessian 代价高;② 非凸时不一定好。
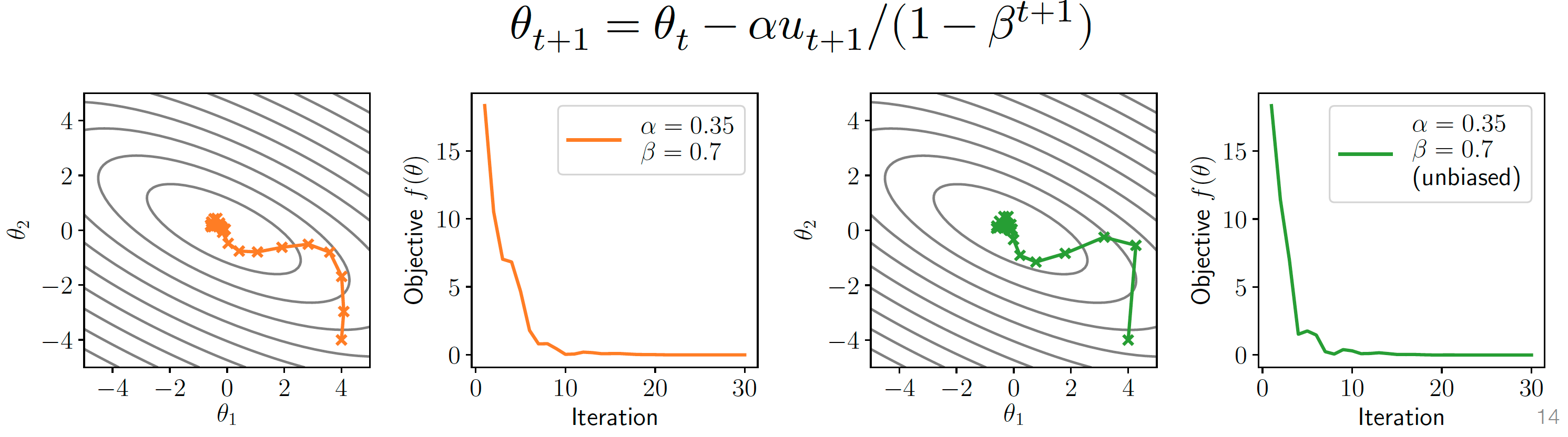
动量法(Momentum)
在梯度基础上引入动量:
- :动量系数, 通常,平滑更新方向,减少震荡。
无偏修正(unbiased):
- 在训练的初期, 历史梯度不够大, 导致动量不够有效, 加上修正能够提高收敛速度
- (左: 修正前, 右: 修正后), 随着t增加, 分母趋近于1, 去除偏差
Nesterov 动量
「未来点」计算梯度:
Adam 优化器
结合动量 + 自适应学习率:
- :偏差修正后的动量
- 实践中 Adam 几乎成为默认选择,但仍存在争议
随机梯度下降(SGD)
核心思想:用 mini-batch 估计梯度:
- 优点:计算快,噪声大但收敛好
- 重要提醒:
- 所有前述算法(Momentum、Adam、Newton 等)在实际中都使用随机版本
- 简单凸二次实验带来的直觉有限,必须在真实网络上大量实验
6.3 权重初始化(Initialization)
为什么不能初始化为 0?
若 ,则:
前向:;
反向:,导致 。
结果:所有层陷入鞍点,无法学习。
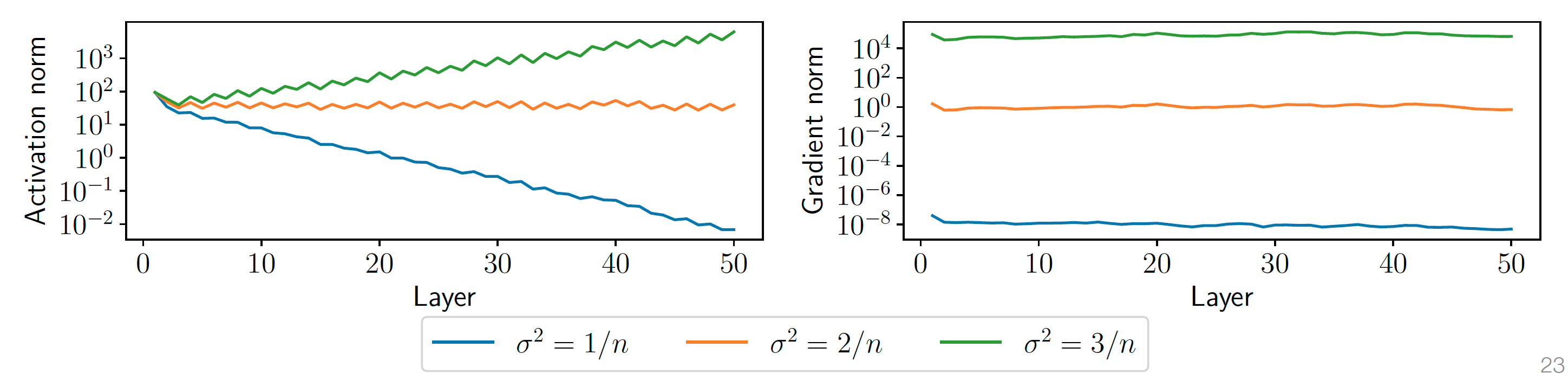
随机初始化的影响
随机初始化, 以 为例:
- 方差 决定:
- 前向激活的范数 ;
- 反向梯度的范数 。
- 实验现象(50 层 ReLU,隐藏层 100 单元):
- :梯度指数级消失;
- :近乎常数;
- :梯度爆炸。
权重移动并不大
- 经验观察:训练后权重距离初始点很近,不同初始化收敛到不同区域。
- 结论:初始化对最终性能影响巨大。
方差推导与 Kaiming 初始化
假设 ,,则:
- 。
- 如果使用了线性激活层, , 则
对 ReLU(约一半神经元置 0),需将方差放大 2 倍:
- Kaiming 正态初始化:。
Kaiming 初始化的推导
在深度学习中,He 初始化(Kaiming 初始化)是一种针对 ReLU 激活函数 的权重初始化方法。它的核心目标是保持每一层的输出方差一致,从而避免梯度消失或爆炸问题。以下是推导过程的详细解释:
1. 基本设定
假设我们有一个全连接层(或卷积层),其输入为 ,权重矩阵为 ,输出为:
然后通过 ReLU 激活函数:
我们的目标是初始化权重 ,使得每一层的输出方差 与前一层的输入方差 保持一致。
2. 方差推导
假设权重 独立同分布,且输入 的均值为 0,方差为 (这是 ReLU 的特性)。
对于输出:
由于和独立,方差为:
其中是权重的方差。
3. ReLU 对输入分布的影响
由于是 ReLU 的输出,即 ,因此的分布是对称的(一半为 0,另一半为正数)。
此时,的平方期望为:
(因为 ReLU 将负值设为 0,正值保留,导致平方期望变为原方差的一半。)
4. 保持方差一致的条件
为了使输出方差与输入方差一致,代入上式:
要求:
解得:
因此,权重应初始化为均值为 0、方差为的分布。
6.4 小结与后续
- 本节课覆盖:
- MLP 的数学与广播实现;
- 从 GD → Newton → Momentum → Nesterov → Adam 的优化演进;
- 随机梯度下降的核心地位;
- 初始化如何影响信号传播与最终解。
- 下节课将深入更多实践技巧与实验分析。
Lec7 神经网络库抽象
7.1 编程抽象(Programming Abstractions)
框架的编程抽象定义了实现、扩展和执行模型计算的通用方式。理解设计背后的思考过程有助于:
- 理解抽象设计的原因
- 学习设计新抽象的经验
案例研究(Case Studies)
因时间有限未深入研究的框架:Theano, Torch7, MXNet, Caffe2, Chainer, JAX...
三种核心抽象模式
1. 前向与反向层接口(Forward and backward layer interface)
代表框架:Caffe 1.0
class Layer:
def forward(bottom, top): # 前向计算
pass
def backward(top, propagate_down, bottom): # 反向传播梯度
pass- 特点:显式定义前向计算和梯度计算操作
- 早期先驱:cuda-convnet(AlexNet框架)
2. 计算图与声明式编程(Computational graph and declarative programming)
代表框架:
TensorFlow 1.0
import tensorflow as tf
v1 = tf.Variable()
v2 = tf.exp(v1)
v3 = v2 + 1
v4 = v2 * v3
sess = tf.Session()
value4 = sess.run(v4, feed_dict={v1: numpy.array([1])})- 特点:先声明计算图 → 通过输入数据(
sess.run)执行图 - 早期先驱:Theano 计算图定义和计算操作分离, 可以有更多的优化机会
- 假如计算的不是v4, 而是v3,
v4 = v2 * v3j计算可以直接skip
3. 命令式自动微分(Imperative automatic differentiation)
代表框架:PyTorch (Needle)
import needle as ndl
v1 = ndl.Tensor([1])
v2 = ndl.exp(v1)
v3 = v2 + 1
v4 = v2 * v3
if v4.numpy() > 0.5:
v5 = v4 * 2
else:
v5 = v4
v5.backward() # 即时反向传播- 特点:动态构建计算图 + 支持Python控制流
- 早期先驱:Chainer
讨论(Discussions)
不同编程抽象的优缺点分析:
| 抽象类型 | 优点 | 缺点 |
|---|---|---|
| 前向/反向接口 (Caffe) | 接口简单,控制明确 | 模块间耦合度高,扩展性受限 |
| 计算图 (TensorFlow) | 支持跨设备优化,部署效率高 | 调试困难,控制流实现复杂 |
| 命令式自动微分 (PyTorch) | 开发调试便捷,支持动态图 | 运行时计算, 导致优化机会较少 |
7.2 高级模块化库组件(High Level Modular Library Components)
机器学习核心元素(Elements of Machine Learning)
- 假设类(Hypothesis Class):
- 损失函数(Loss Function):
- 优化方法(Optimization Method):
关键问题:如何将上述元素转化为代码中的模块化组件?
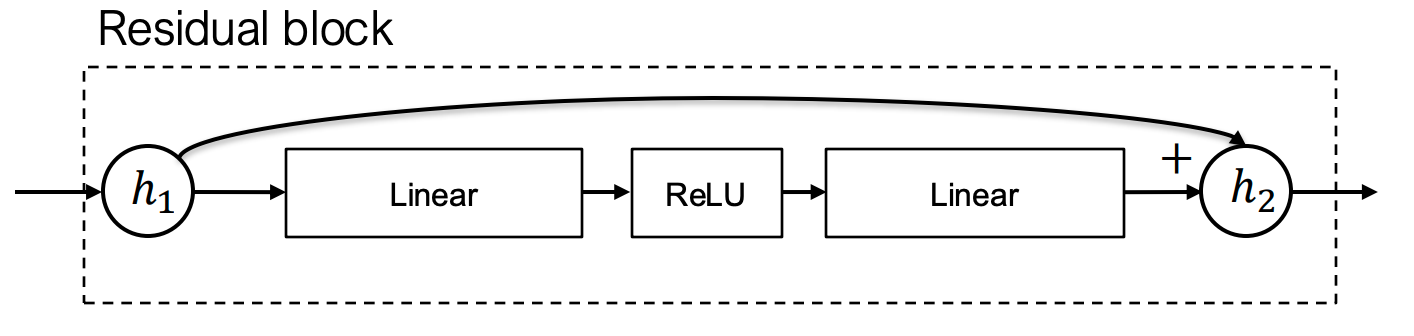
深度学习的模块化本质
深度学习模型本质是模块的组合(如多层残差网络):
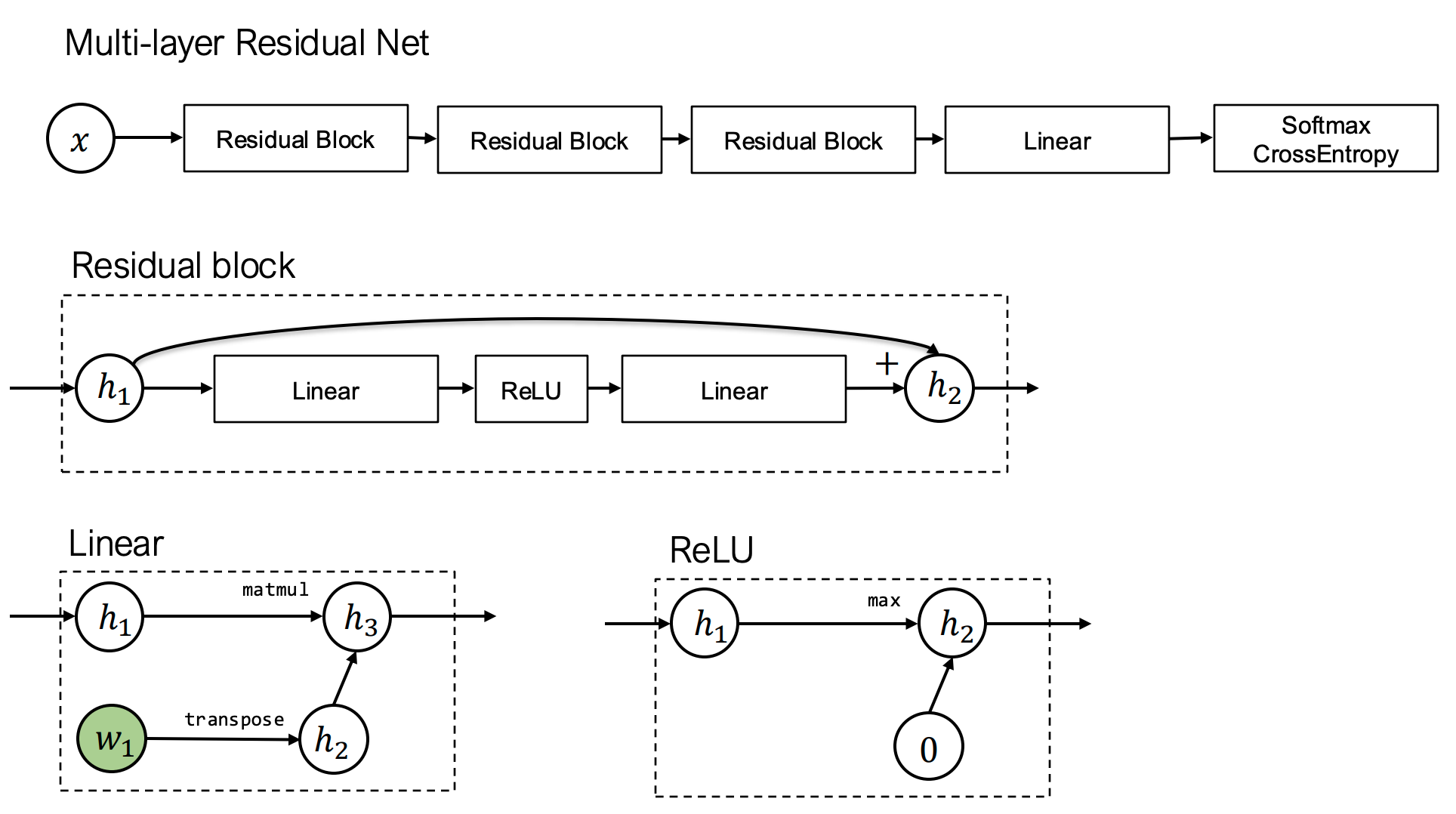
残差连接结构示意图(摘自ResNet论文)
- 上图的每一个方框都可以视为一个模块
模块化组件设计
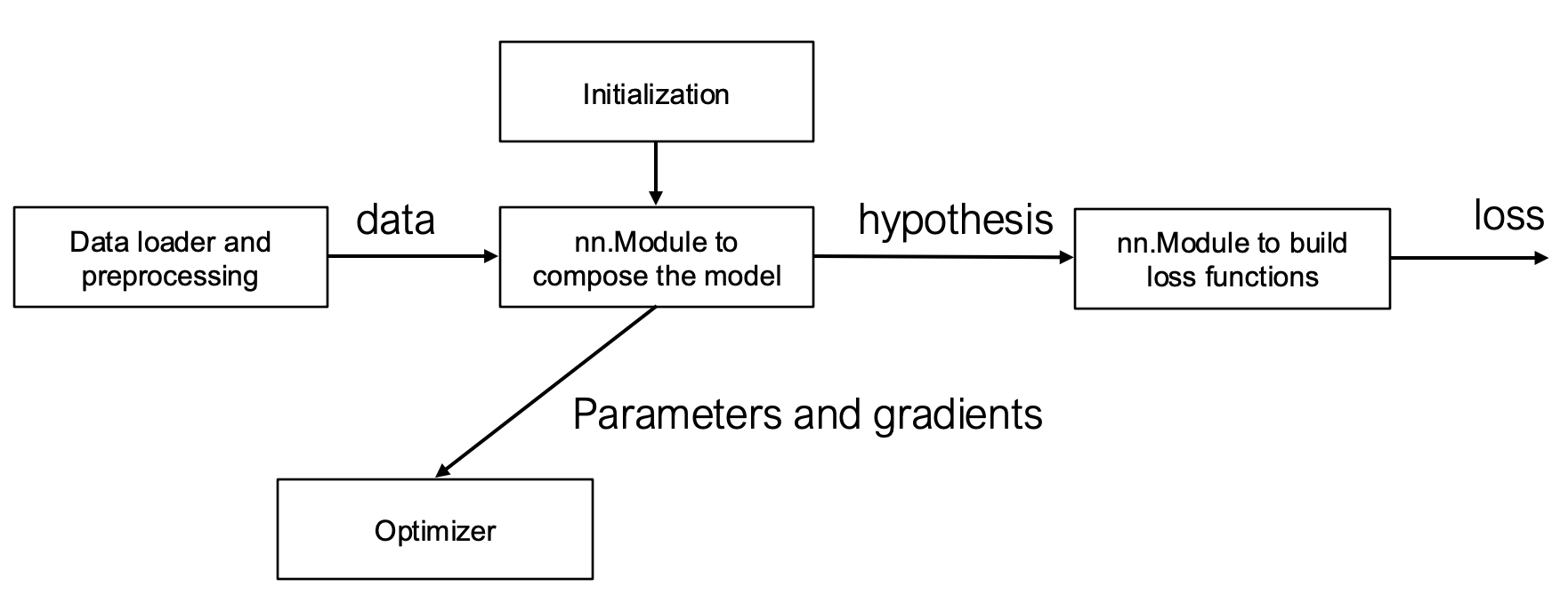
1. nn.Module:组合模块
- 核心功能:tensor in → tensor out
- 关键要素:
- 给定输入计算输出
- 获取(可训练)参数列表
- 参数初始化方法
- 代码示例:
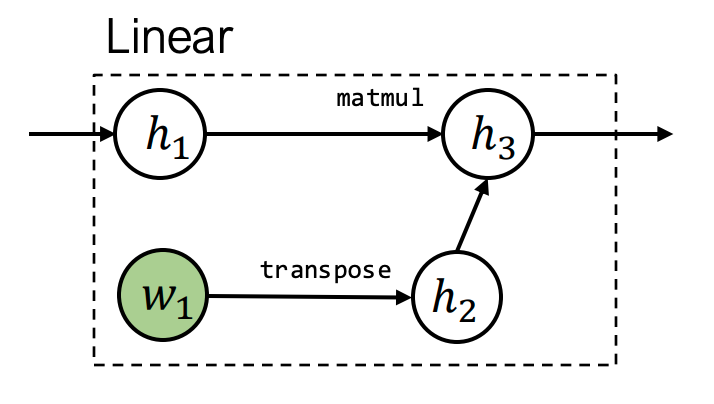
class Linear(Module):
def __init__(self, in_features, out_features):
self.weight = Parameter(...) # 可训练参数
self.bias = Parameter(...)
def forward(self, X):
return X @ self.weight + self.bias2. 损失函数:特殊模块
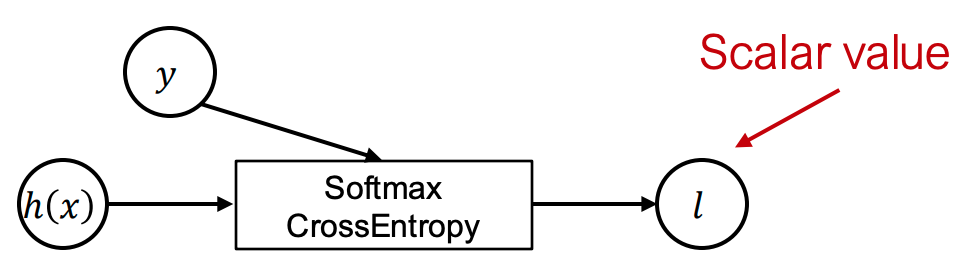
特性:张量输入 → 标量输出
- 例如交叉熵损失:
扩展问题:
- 如何组合多目标函数?
- 训练完成后推理阶段的行为?
3. 优化器(Optimizer)

- 功能:根据模型权重执行优化步骤
- 状态管理:跟踪辅助状态(如动量)
- 常见优化器:
- SGD:
- SGD with momentum:
- Adam:
4. 正则化与优化器
- 实现方式:
- 作为损失函数的一部分(如L2正则项)
- 直接整合到优化器更新中
- 例:带权重衰减的SGD
5. 参数初始化(Initialization)
- 策略依赖:模块类型和参数种类
- 常见方法:
- 权重(weights):均匀分布(幅度取决于输入/输出维度)
- 偏置(bias):零初始化
- 方差累加项:初始化为1
- 执行时机:在
nn.Module构建阶段完成
6. 数据加载与预处理(Data Loader and Preprocessing)
流程:

- 经常通过混洗(shuffle)和变化进行输入的预处理
重要性:数据增强对深度学习模型预测精度提升有显著贡献
特性:数据管道本身具有组合性
讨论(Discussions)
其他可能的模块化组件示例:
- 学习率调度器(Learning Rate Scheduler)
- 梯度裁剪模块(Gradient Clipping)
- 自定义激活函数(如Swish, GELU)
- 分布式训练通信原语
Revisit Programming Abstraction
分层抽象设计
以PyTorch(Needle)为例:
- 底层:张量计算图抽象(处理自动微分)
- 高层:模块化组合抽象(如
nn.Module)
对比早期框架(Caffe 1.0)
class Layer:
def forward(bottom, top): ...
def backward(top, propagate_down, bottom): ...- 局限:将梯度计算与模块组合紧密耦合
Lec9 深度学习系统:归一化与正则化
9.1 引言
本讲主要讨论深度学习中的两个关键技术:归一化(Normalization) 和 正则化(Regularization),以及它们与优化、初始化之间的相互作用。
- 归一化:用于稳定和加速训练过程,通过调整层间激活值的分布。
- 正则化:用于防止过拟合,提升模型在测试集上的泛化能力。
- 三者(优化、初始化、归一化、正则化)之间存在复杂而深刻的交互关系。
9.2 初始化与优化的交互
问题提出: 假设我们初始化权重为 ,其中对于 ReLU 网络通常选择 。那么是否在几次优化迭代后,权重的尺度就会“自动修正”?
答案:不会!
- 如果初始化不当,深层网络即使使用标准 SGD 也无法成功训练。
- 更根本的问题是:即使训练成功,初始化时的尺度效应在整个训练过程中仍然持续存在
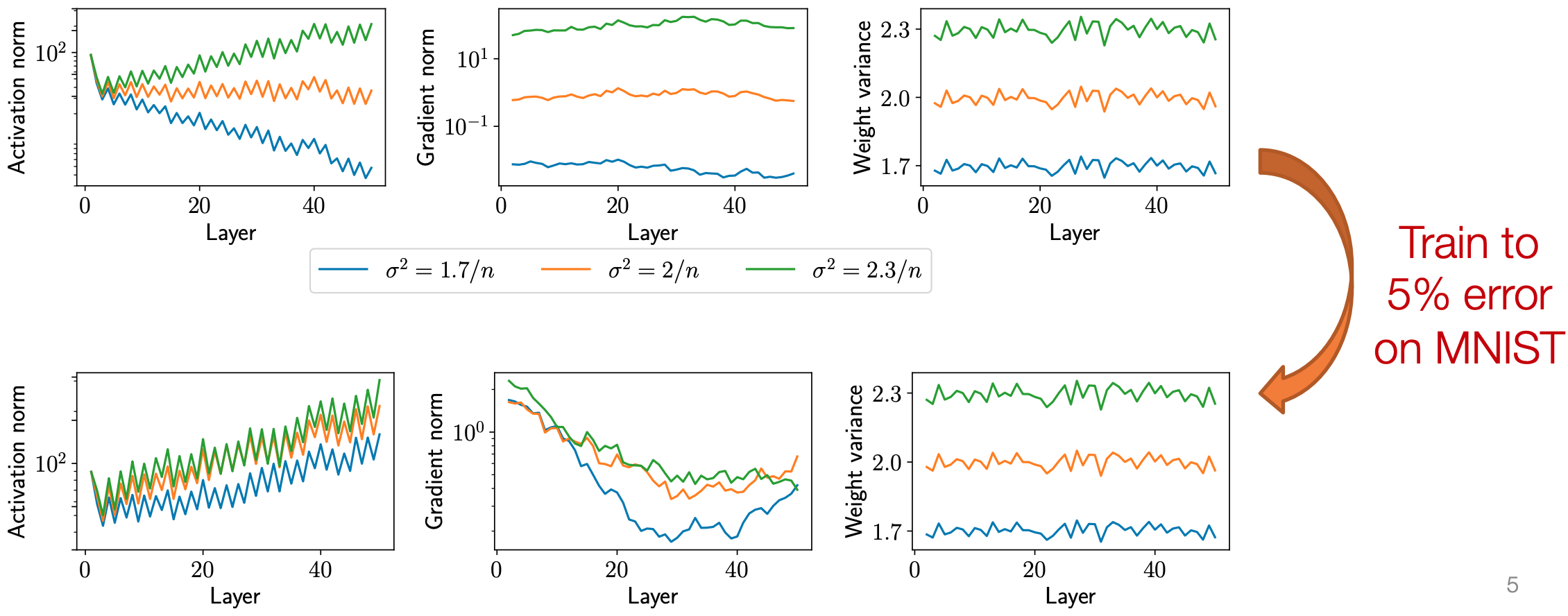
- 图中, 训练后不同方差的激活值和梯度趋近, 但是权重的分布与训练前变化相差不大
实验观察:  图1:不同初始化方差对激活值和梯度的影响(50层网络)
图1:不同初始化方差对激活值和梯度的影响(50层网络)
| 初始化方差 | 激活值范数(Activation Norm) | 梯度范数(Gradient Norm) | 训练结果 |
|---|---|---|---|
| 随层数指数增长(>10³) | 极小(~10⁻⁸) | 溢出(NaN) | |
| 稳定在 ~1 | 保持稳定 | ✅ 成功训练 | |
| 指数衰减(<10⁻²) | 快速消失 | ❌ 无进展 |
结论:初始化严重影响训练动态,且其影响贯穿整个训练过程。
9.3 归一化(Normalization)
动机
- 初始化的影响难以在训练中“自我修复”。
- 深度网络中每一“层”可以是任意计算操作。
- 解决方案:引入额外的层,显式地“修复”每层激活值的分布。
9.3.1 层归一化(Layer Normalization)
定义: 对每一层的激活值进行归一化,使其均值为 0,方差为 1。 设第 层输出为:
- hat表示这是归一化前的值 则层归一化定义为:
- 是均值,
- 是一个小常数,防止除零
常见扩展: 通常还会加入可学习的缩放和平移参数:
其中 是可学习的标量参数。
9.3.2 层归一化效果
图2:层归一化前后对比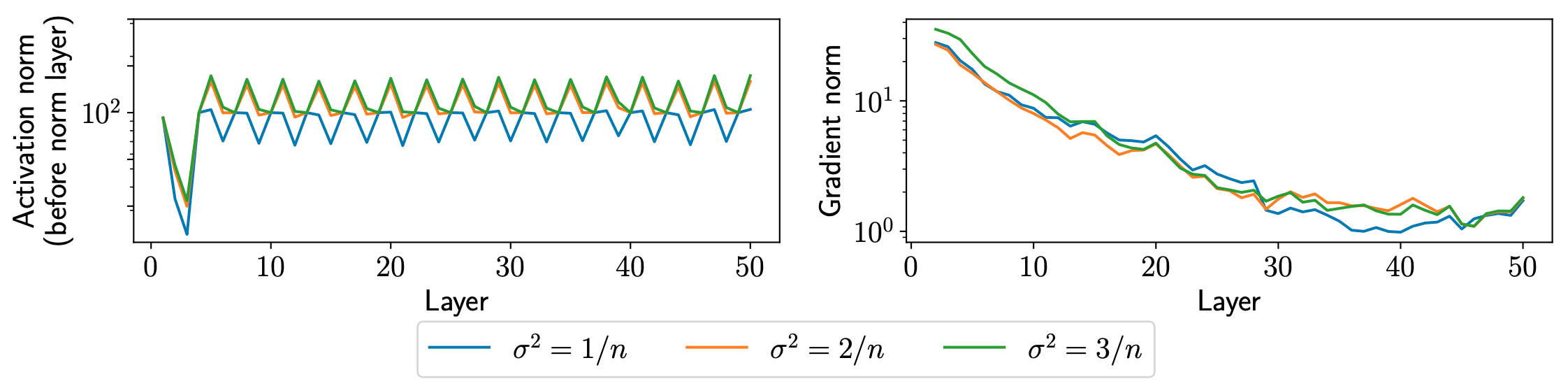
| 指标 | 归一化前() | 归一化后 |
|---|---|---|
| 激活值范数 | 随层数变化剧烈(1.7 → 2.3) | 统一为 ~1 |
| 梯度范数 | 差异明显 | 更加稳定 |
| 权重方差 | 初始差异保留 | 影响减弱 |
结论:层归一化有效“修复”了激活值的范数问题。
实际表现:
- 在标准全连接网络(FCN, 或者多层感知机MLP)中,较难训练到较低损失。
- 原因:不同样本之间的相对激活范数可能包含有用的判别信息,而 LayerNorm 抹平了这些差异。
9.3.3 批归一化(Batch Normalization)
核心思想: 从“按行归一化”(LayerNorm)转向“按列归一化”——即在小批量(minibatch)维度上对每个特征进行归一化。
设激活矩阵为:
其中每行对应一个样本,每列对应一个特征。 
批归一化对每一列(即每个特征)在 minibatch 上计算均值和方差,并进行归一化:
- m为每个batch的样本数 同样可加入可学习参数 。
9.3.4 小批量依赖性(Minibatch Dependence)
- 问题:BatchNorm 使得每个样本的输出依赖于整个 minibatch,这在测试(推理)时不可接受, 因为batch size可能为1
- 解决方案:
- 在训练时维护每个特征的运行平均(running average) 的均值 和方差 。
- 测试时使用这些统计量进行归一化:
9.4 正则化(Regularization)
背景
- 深度网络通常是过参数化(overparameterized) 的:参数数量远超训练样本数。
- 传统机器学习理论认为这会导致严重过拟合overfit。
- 然而实践中,许多深度网络泛化良好,但并非总是如此(大模型仍可能过拟合)。
9.4.1 正则化的定义与分类
正则化:限制函数类的复杂度,以提升泛化能力。
分为两类:
隐式正则化(Implicit Regularization):
- 来自优化算法(如 SGD)或网络结构本身。
- 例如:我们并非在“所有神经网络”空间中搜索,而是在 SGD + 初始化所能到达的子空间中搜索。
显式正则化(Explicit Regularization):
- 显式修改网络或训练过程以限制复杂度。
- 例如: 正则化、out。
9.4.2 正则化(Weight Decay)
使用 正则化的目标函数:
- F-范数: , 类似向量的L2范数 梯度下降更新规则:
即:每步先将权重乘以 (衰减),再进行梯度更新。
9.4.3 正则化的局限性
- 尽管 正则化在深度学习中广泛使用(常称为“weight decay”),但其有效性存疑。
- 问题:在深度网络中,参数大小可能不是复杂度的良好代理。
- 如前所示,不同初始化导致的参数尺度差异在整个训练中持续存在,而 正则化可能无法有效控制真正的“复杂度”。
9.4.4 Dropout
Dropout方法:在训练时,以概率 随机将某些激活值置零。
设:
Dropout 操作:
注意:训练时除以 以保持期望值不变;测试时不使用 Dropout,直接使用原始激活值。
直观解释:
- 常被解释为“增强鲁棒性”或“防止共适应”。
- 但为何有效?为何测试时不使用?
9.4.5 Dropout 作为随机近似
Dropout 可类比于 SGD 的随机性:
SGD:从完整损失中采样 minibatch 近似梯度:
Dropout:对输入特征进行随机子集采样:
其中 是以概率 采样的特征子集。
类比:Dropout 在特征空间引入随机性,类似 SGD 在数据空间引入随机性。
9.5 各因素的交互作用
设计选择众多:
- 优化器选择(学习率、动量等)
- 权重初始化
- 归一化层(BatchNorm, LayerNorm 等)
- 正则化方法(Dropout, weight decay)
- 其他技巧:残差连接、学习率调度等
感受:深度学习实践看似像是“在大量 GPU 上随机试错”。
BatchNorm 的反思(Ali Rahimi 演讲引用)
“我们对 BatchNorm 的理解是:它有效,因为它减少了‘内部协变量偏移(internal covariate shift)’。
但你难道不想知道:
- 为什么减少内部协变量偏移能加速梯度下降?
- 有没有定理或实验证据?
- 什么是内部协变量偏移?
- 有没有明确定义?”
—— Ali Rahimi(NeurIPS 2017 时间检验奖演讲)
启示:当前许多深度学习技术仍缺乏坚实的理论基础,更多依赖经验。
BatchNorm 的其他观察
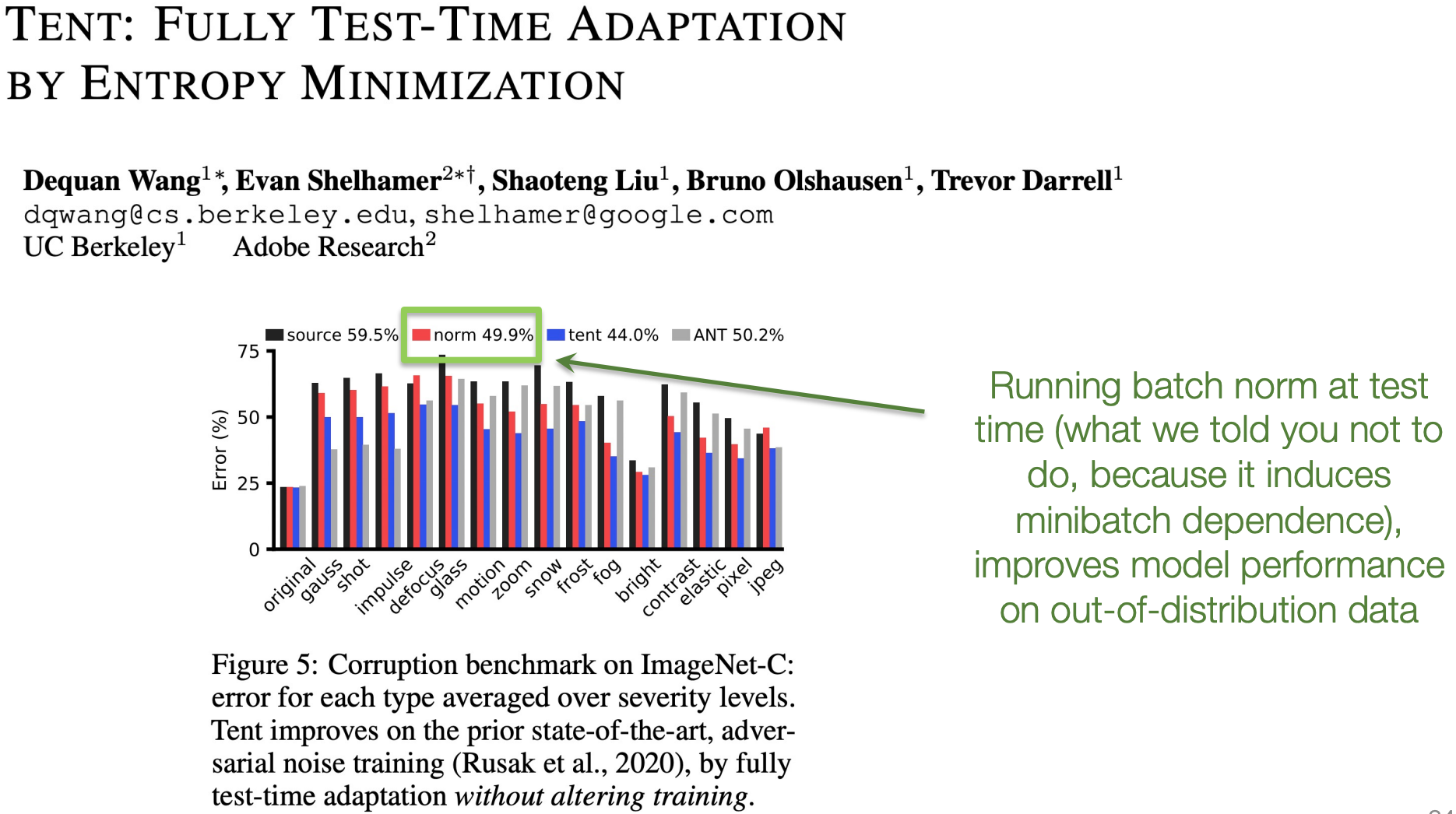
- 反常现象:在测试时使用当前 minibatch 的统计量(即“运行 BatchNorm”),反而能提升模型在分布外(out-of-distribution)数据上的性能。
- 这与我们“应使用运行平均”的常规做法相悖,说明 BatchNorm 的机制仍不完全清楚。
9.8 总结与启示
- 不要误解:深度学习并非全是“随机黑科技”,已有大量优秀的实验研究。
- 现实:我们尚未完全理解各种经验技巧(如 BatchNorm、Dropout、初始化等)如何工作以及如何相互作用。
- 好消息:在许多情况下,不同的架构和方法组合往往能达到相似的良好性能。
- 因此,设计模型时可尝试多种路径,不必拘泥于单一“最佳实践”。
Lec10 卷积网络 (Convolutional Networks)
10.1 深度网络中的卷积算子 (Convolutional operators in deep networks)
全连接网络 (fully connected networks) 的问题
到目前为止,我们考虑的网络都是将输入图像视为向量
这在我们试图处理更大图像时会产生一个严重的问题:
- 一个 的 RGB 图像是约 20 万维的输入
- 将其映射到一个 1000 维的隐藏向量需要 2 亿个参数 (仅单层)
此外,这种方式没有捕捉到我们期望在图像中存在的任何“直观”的不变性 (invariances)
- 例如,将图像平移一个像素会导致下一层输出完全不同
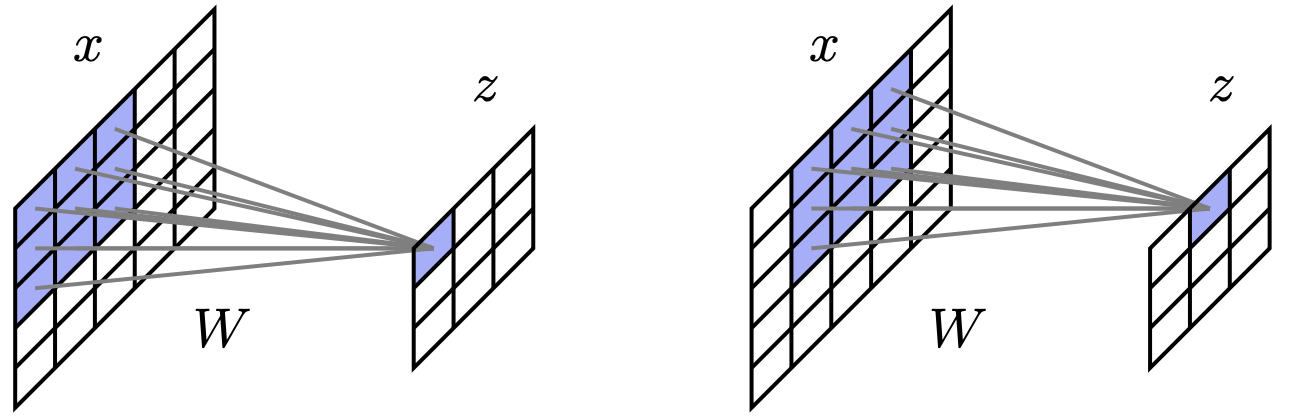
卷积如何“简化”深度网络
卷积结合了两种非常适合处理图像的思想
- 要求层与层之间的激活仅在“局部” (
local) 发生,并将隐藏层本身也视为空间图像 - 在所有空间位置上共享权重 (
share weights)
卷积的优势
- 大幅减少参数数量
- 一个 的灰度图输入到一个 的单通道隐藏层:
- 在全连接网络中需要 40 亿个参数
- 在一个 的卷积中只需要 9 个参数
- 一个 的灰度图输入到一个 的单通道隐藏层:
- 捕捉(部分)“自然”的不变性
- 将输入图像向右平移一个像素,会使隐藏单元的“图像”也相应平移
卷积详解
卷积是许多计算机视觉和图像处理算法中的一个基本操作 其思想是“滑动”一个 的权重矩阵 (称为 filter 或 kernel) 在图像上,以生成一个新的图像,记为
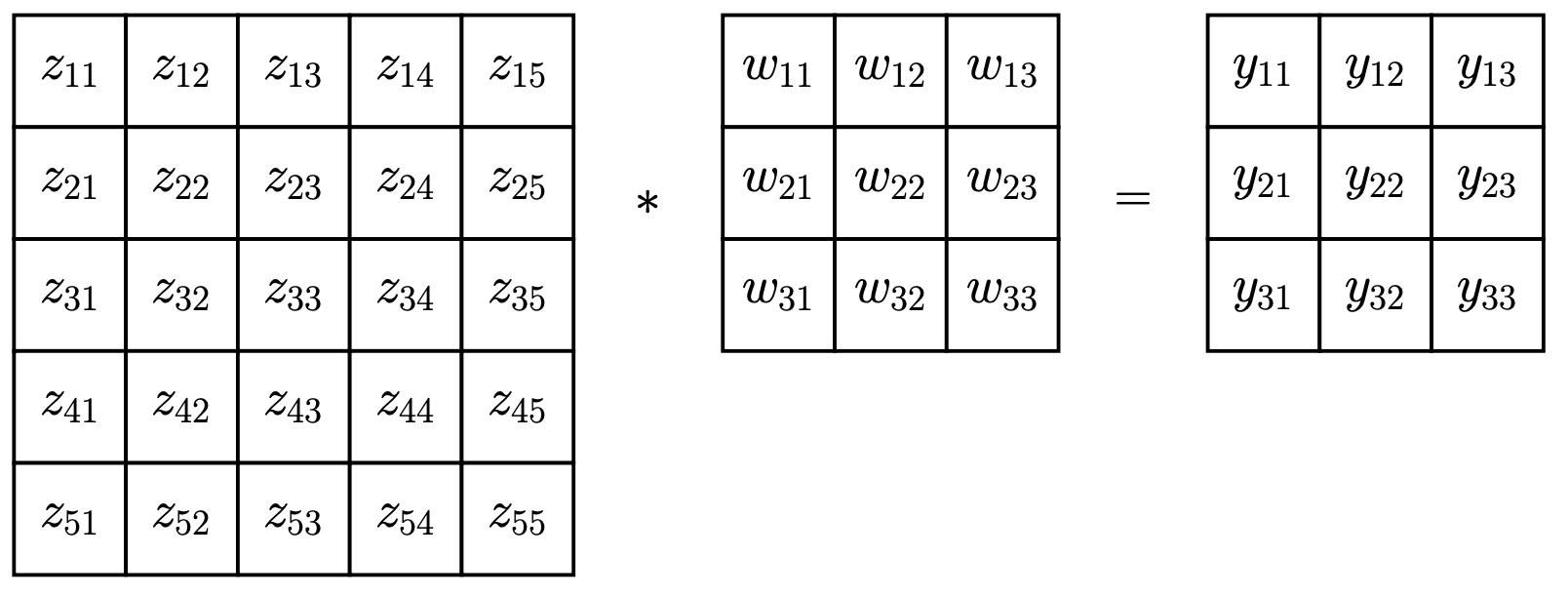
计算过程示例:
计算输出 :
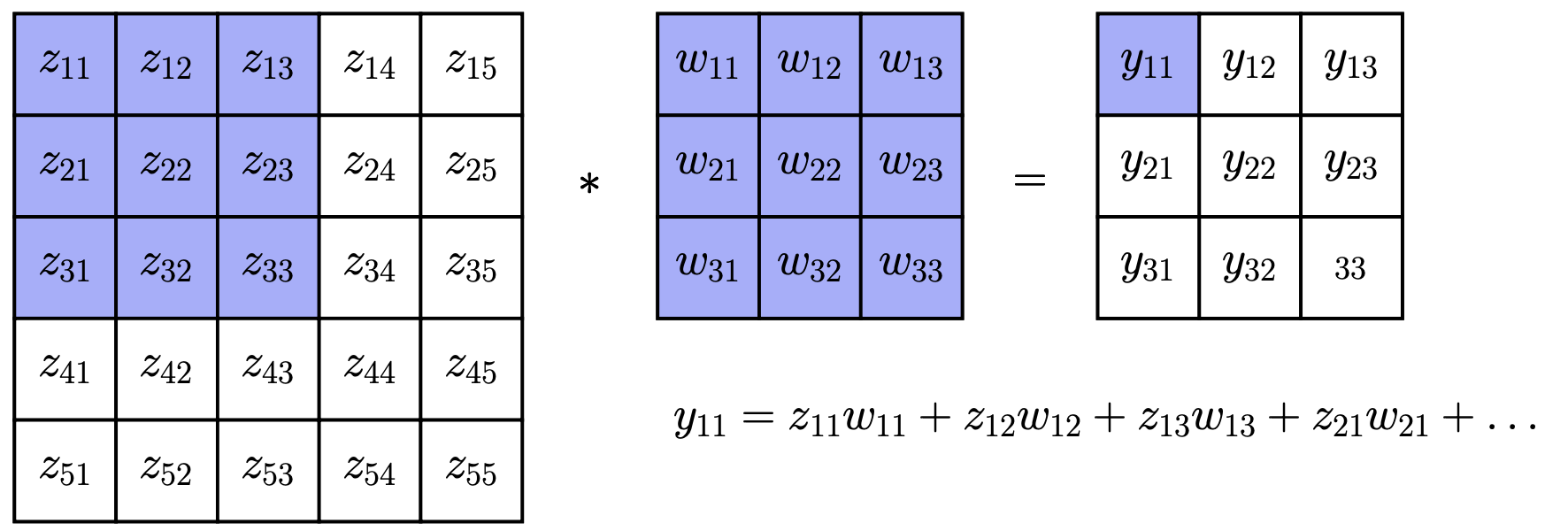
计算输出 :
计算输出 :
计算输出 :
计算输出 :
计算输出 :
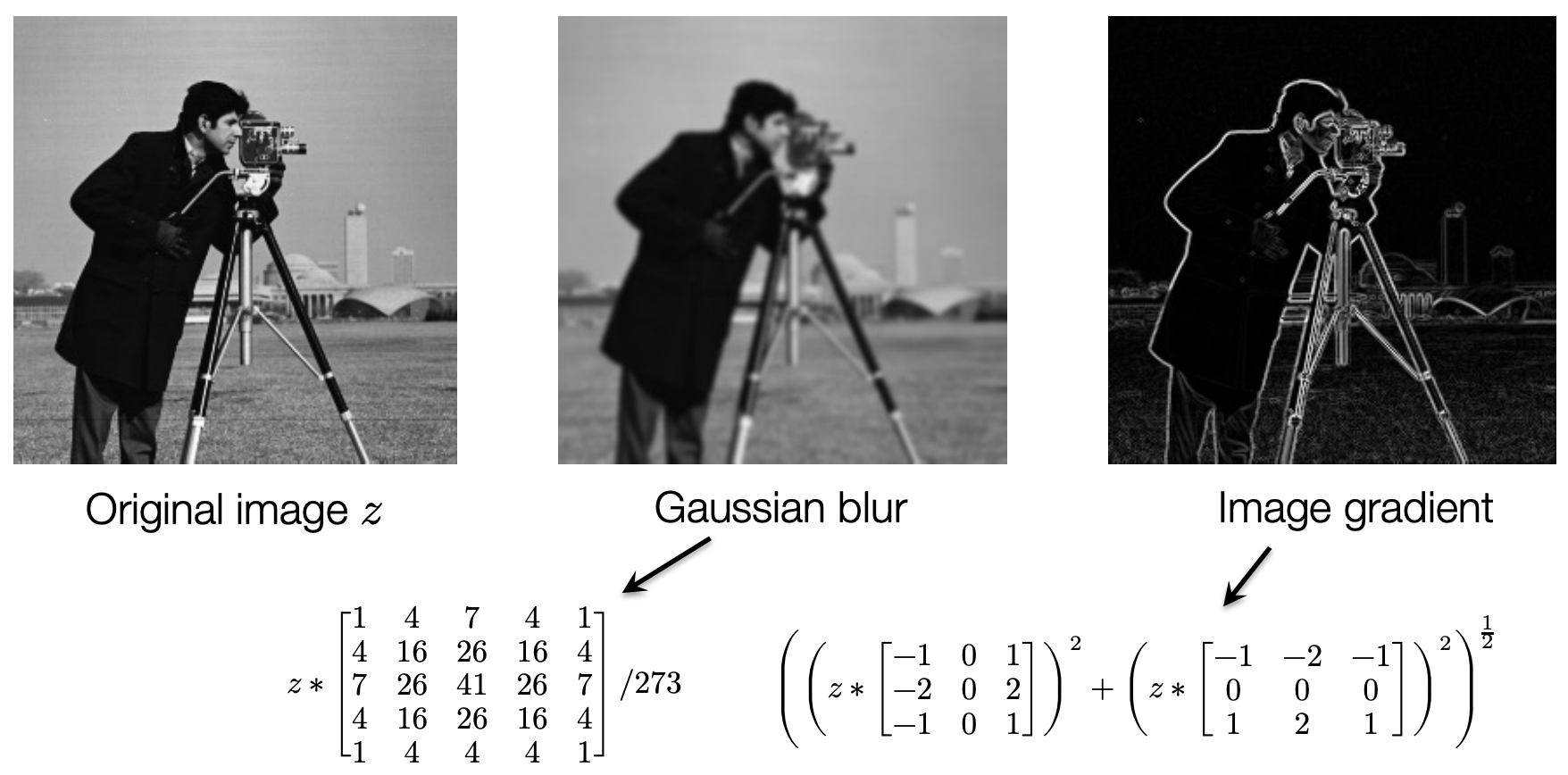
图像处理中的卷积
卷积(通常使用预设定的 filter)是许多计算机视觉应用中的常见操作;卷积网络只是转向了学习这些 filter
深度网络中的卷积
深度网络中的卷积几乎总是多通道卷积 (multi-channel convolutions):将多通道(例如 RGB)输入映射到多通道隐藏单元
- 输入 表示一个 通道, 大小的图像
- 输出 表示一个 通道, 大小的图像
Filter(一个 4 阶张量) k是卷积核大小
多通道卷积为每个输入-输出通道对包含一个卷积 filter,单个输出通道是所有输入通道卷积结果的和
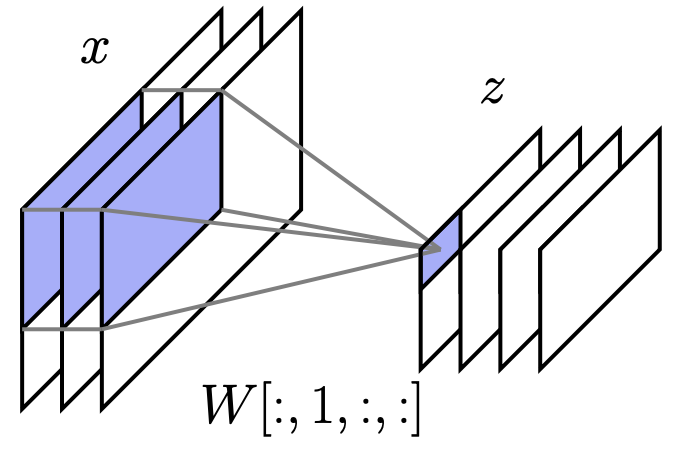
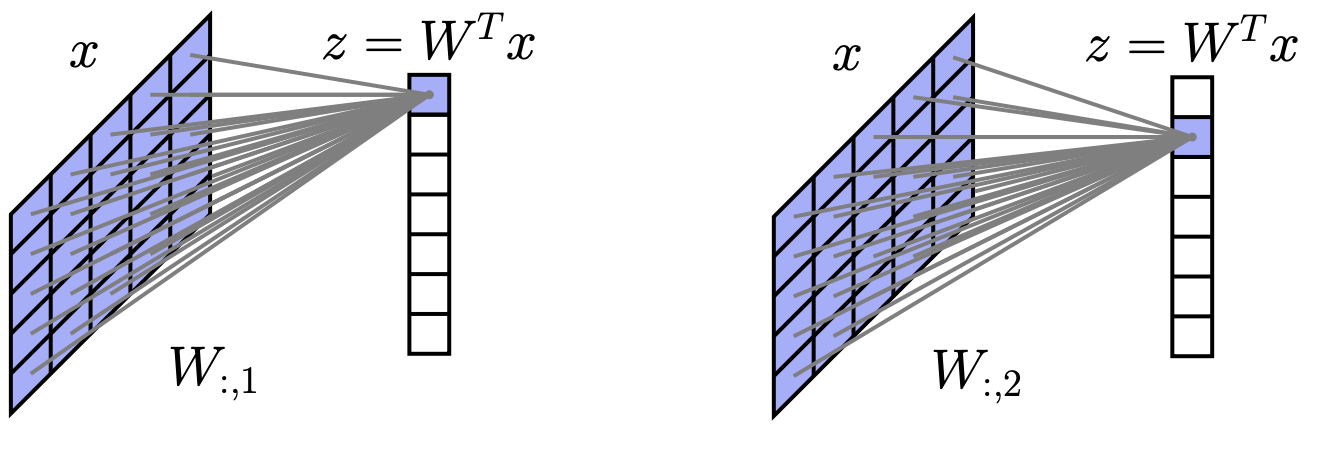
多通道卷积的矩阵-向量形式
有一种更直观的方式来理解多通道卷积:它们是传统卷积的推广,其中标量乘法被替换为矩阵-向量乘积 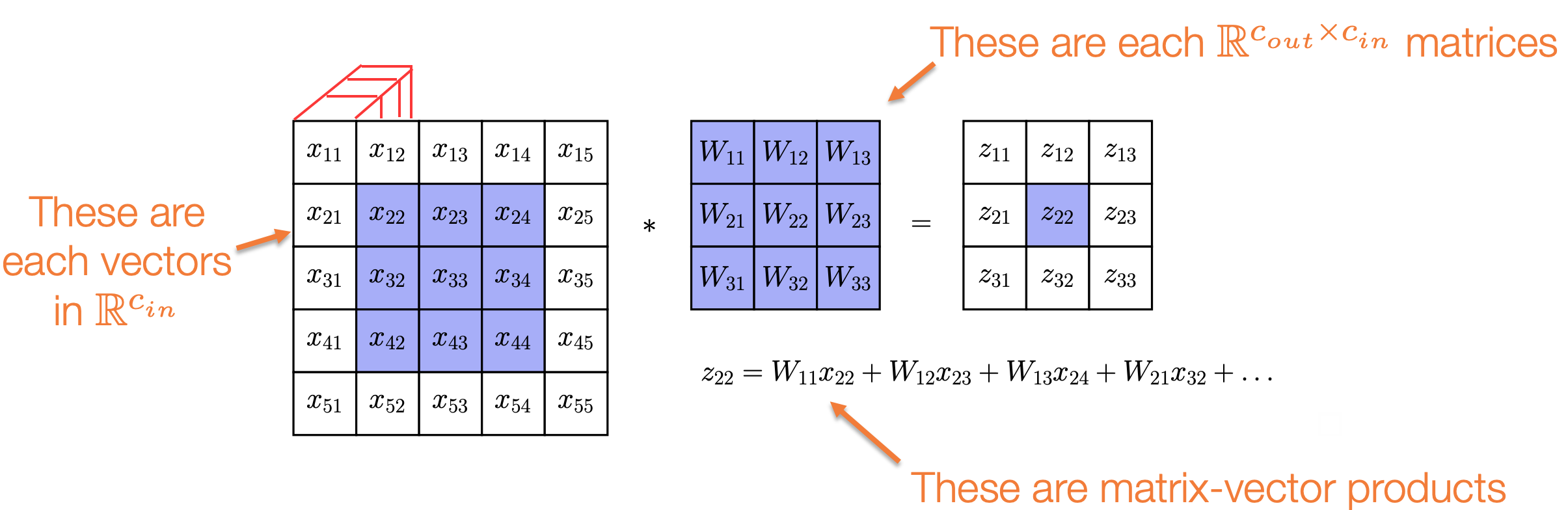
- 输入图像中的每个 都是 中的向量
Filter中的每个 都是 的矩阵- 计算 的公式:
- 这里的乘法是矩阵-向量乘积
10.2 实用卷积的要素 (Elements of practical convolutions)
Padding
- 挑战: “朴素”的卷积产生的输出图像比输入图像小
- 解决方案: 对于(奇数)大小为 k 的
kernel,在输入图像的所有边填充 个零,这使得输出与输入大小相同 - 变体:
circular padding,使用均值填充等
步幅卷积 (Strided Convolutions) / 池化 (Pooling)
- 挑战: 卷积在每一层都保持输入的分辨率,不能直接产生不同“分辨率”的表示
- 解决方案 #1: 引入
max或average pooling层来聚合信息 - 解决方案 #2: 以大于 1 的增量(即
stride)在图像上滑动卷积filter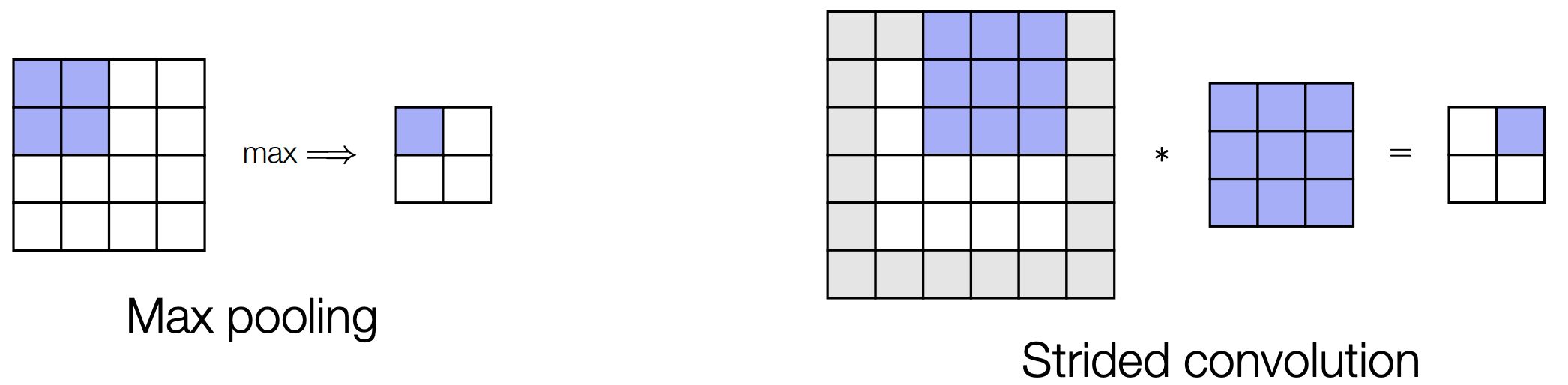
分组卷积 (Grouped Convolutions)
- 挑战: 对于大量的输入/输出通道,
filter的权重数量仍然很大,可能导致过拟合 (overfitting) 和计算缓慢 - 解决方案: 将通道分组,使得输出中的通道组仅依赖于输入中对应的通道组(等效于强制
filter权重矩阵为块对角矩阵)
扩张卷积 (Dilations)
- 挑战: 单个卷积的感受野 (
receptive field) 相对较小 - 解决方案: 扩张 (
dilate或spread out) 卷积filter,使其覆盖图像的更大范围 - 注意: 为了再次获得相同大小的图像,需要添加更多的
padding
10.3 卷积的微分 (Differentiating convolutions)
微分需要什么?
回想一下,为了将任何操作集成到深度网络中,我们需要能够乘以其偏导数(伴随操作 adjoint operation)
如果我们定义操作为 那么我们如何乘以其伴随算子?
回顾矩阵乘法的微分
考虑一个更简单的情况:矩阵-向量乘积
- ,所以我们需要计算伴随积
- 换句话说,对于矩阵向量乘法操作
Wx,计算反向传播需要乘以转置矩阵
那么,什么是“卷积的转置”呢?
将卷积视为矩阵乘法:版本 1
为了回答这个问题,我们先考虑一个 1D 卷积以简化问题 我们可以将一个 1D 卷积 (例如,使用零填充) 写成矩阵乘法 的形式

卷积的伴随算子 (Adjoint)
那么我们如何乘以转置矩阵 呢?
请注意,操作 本身就是与一个“翻转”的 filter 进行的卷积 因此,伴随算子 只需要用翻转后的 W 对 进行卷积
将卷积视为矩阵乘法:版本 2
那么另一个伴随算子 呢? 对于这一项,我们可以观察到卷积也可以写成一个矩阵-向量乘积,其中 filter 被视为向量
因此,其伴随操作需要乘以这个基于 x 构建的矩阵的转置(这实际上是一种相当实用的方法,参见未来关于 im2col 操作的讲座)
Lec11 硬件加速
11.1 通用加速技术
机器学习框架中的层次
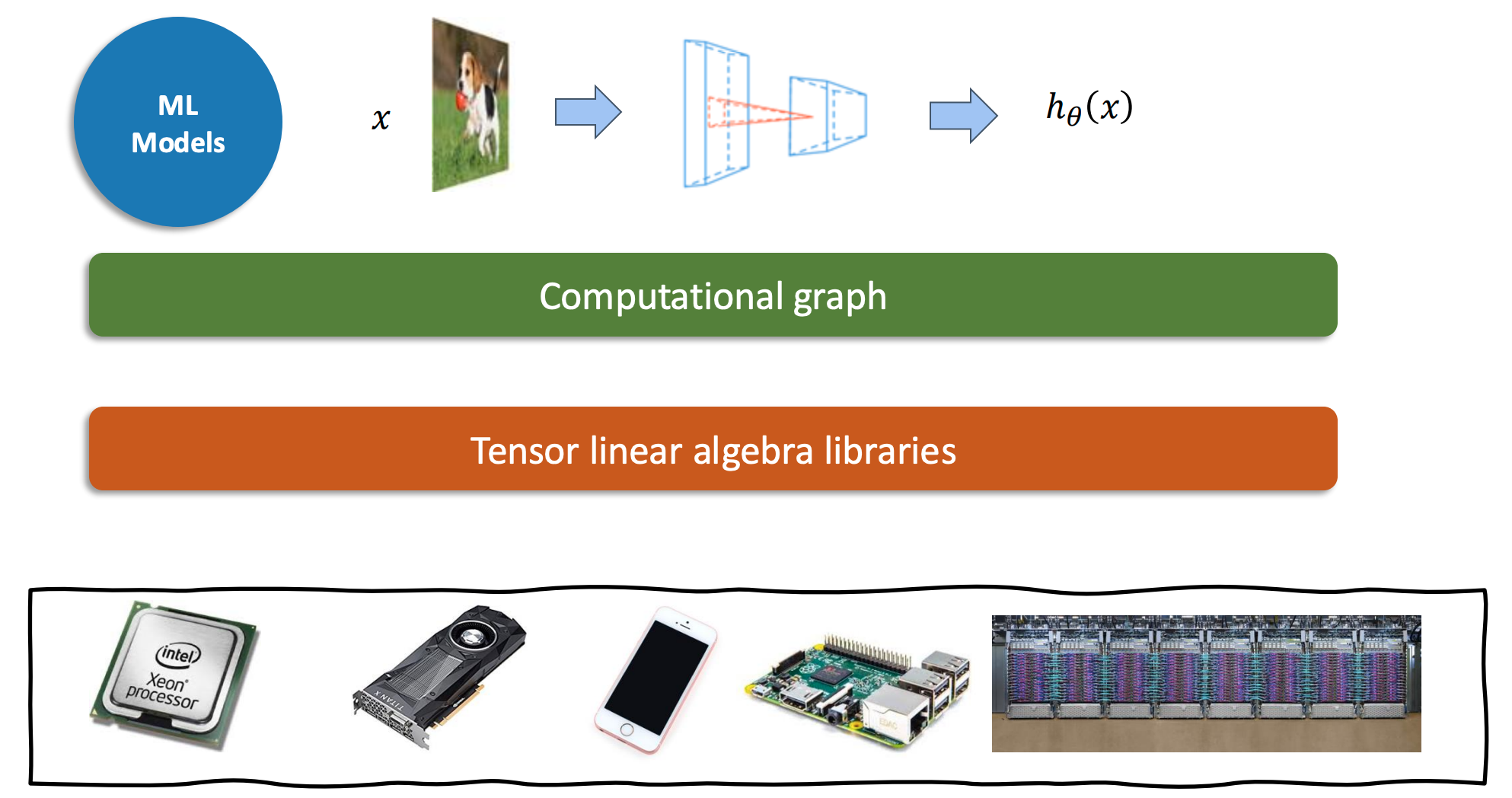
- 最上层是机器学习模型 (
ML Models) - 模型接收输入
x(例如一张图片) - 模型内部由一个计算图 (
Computational graph) 表示 - 计算图的节点是张量 (
Tensor) 和线性代数库 (Tensor linear algebra libraries) 定义的操作 - 最终输出结果
- 这些计算可以运行在各种硬件上,例如:
- Intel Xeon Processor (CPU)
- GPU
- 手机
- Raspberry Pi
- 服务器集群
Vectorization (向量化)
向量化是一种利用 SIMD (Single Instruction, Multiple Data) 指令并行处理多个数据元素的技术
例子:两个长度为256的数组相加
// C 语言示例(伪)代码
void vecadd(float* A, float *B, float* C) {
for (int i=0; i<64; ++i) {
// load_float4, add_float4, store_float4 都是向量化指令的抽象
// 一次处理 4 个浮点数(4个byte)
float4 a = load_float4(A + i*4);
float4 b = load_float4(B + i*4);
float4 c = add_float4(a, b);
store_float4(C + i*4, c);
}
}- 额外要求: 内存
(A, B, C)需要是128位对齐的
内存对齐: 内存起始地址必须为32的倍数, 这样可以避免数据跨越内存总线宽度 / cache line, 减少访存次数&防止缓存污染
数据布局 (Data layout) 和步幅 (strides)
问题:如何在内存中存储一个矩阵
- 行主序 (Row major):
- 列主序 (Column major):
- 步幅格式 (Strides format):
关于 Strides 的讨论
- 优点: 可以用零拷贝 (
zero copy) 的方式实现某些变换/切片- 切片 (Slice): 改变起始偏移量和形状 (
shape) - 转置 (Transpose): 交换 (
swap) 步幅 - 广播 (Broadcast): 插入一个等于 0 的步幅
- 切片 (Slice): 改变起始偏移量和形状 (
- 缺点: 内存访问可能变得不连续, 因为执行计算时操作的是底层的原始数组
- 这使得向量化 (
vectorization) 更加困难 - 许多线性代数操作可能需要先将数组紧凑化 (
compact):- 需要在执行计算前检查是否compact, 如果不是, 进行compact处理, 根据stride创建一个数组
- 或者直接实现一个迭代器根据stride进行计算的版本
- 这使得向量化 (
Parallelization (并行化)
利用多线程并行执行计算
// 使用 OpenMP 的并行化 vecadd 示例
void vecadd(float* A, float *B, float* C) {
// #pragma omp parallel for 指令告诉编译器用多个线程并行执行这个 for 循环
#pragma omp parallel for
for (int i=0; i<64; ++i) {
float4 a = load_float4(A + i*4);
float4 b = load_float4(B + i*4);
float4 c = add_float4(a, b);
store_float4(C + i*4, c);
}
}- 该指令会在多个线程上执行计算
11.2 案例学习:矩阵乘法
朴素矩阵乘法 (Vanilla matrix multiplication)
计算
float A[n][n], B[n][n], C[n][n];
for (int i=0; i<n; ++i)
for (int j=0; j<n; ++j) {
C[i][j] = 0;
for (int k=0; k < n; ++k) {
C[i][j] += A[i][k] * B[j][k];
}
}
}- 时间复杂度为
现代 CPU 的内存层次结构 (Memory hierarchy)
| 内存层级 | 延迟 (Latency) | 相对延迟 |
|---|---|---|
| Registers | ||
| L1 Cache | 0.5 ns | |
| L2 Cache | 7ns | 14x L1 cache |
| DRAM | 200ns | 20x L2 cache, 200x L1 cache |
(数据来源: Latency numbers every programmer should know)
体系结构感知分析 (Architecture aware analysis)
分析朴素矩阵乘法中的内存访问开销
dram float A[n][n], B[n][n], C[n][n];
for (int i=0; i<n; ++i) {
for (int j=0; j<n; ++j) {
register float c = 0;
for (int k=0; k<n; ++k) {
register float a = A[i][k];
register float b = B[j][k];
c += a * b;
}
C[i][j] = c;
}
}dram->register的时间成本:- 对于 是
- 对于 是
- 加载总成本:
register内存成本: 3 (用于 a, b, c)
寄存器分块矩阵乘法 (Register tiled matrix multiplication)
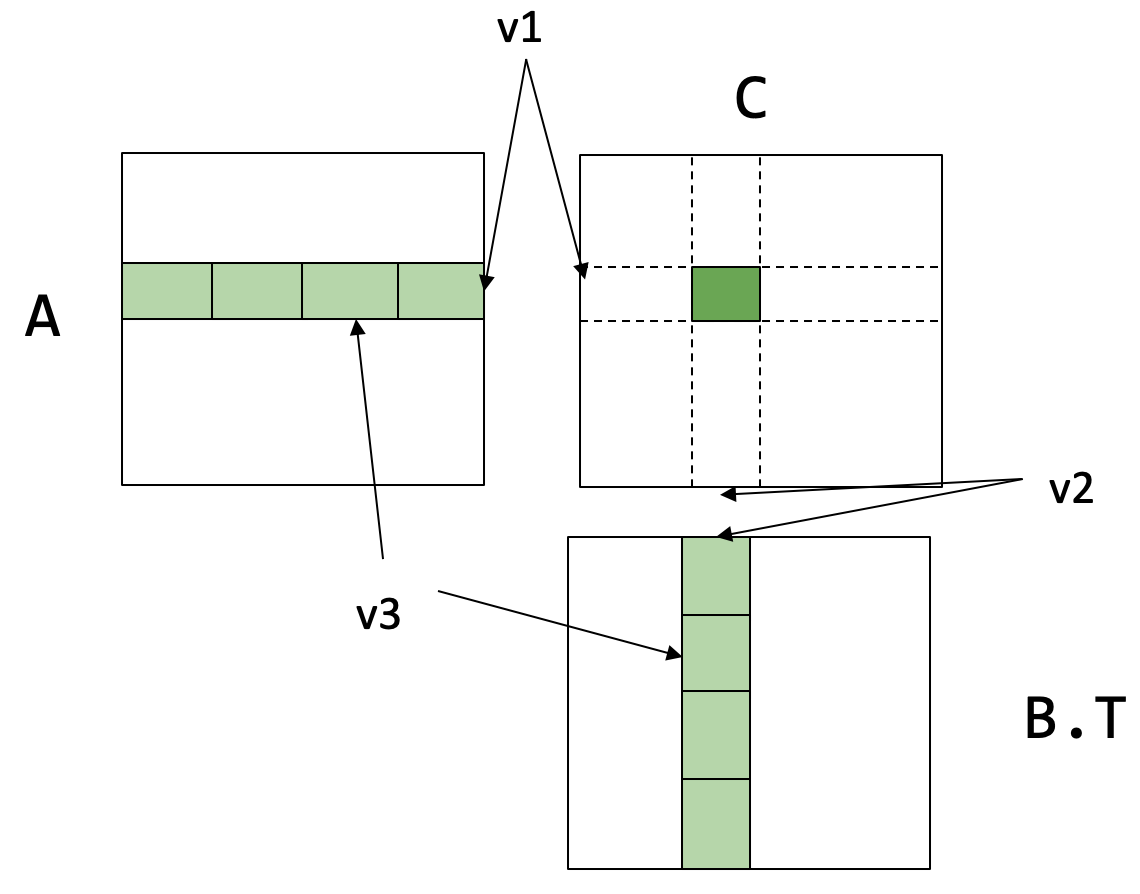
// v1, v2, v3 是 tiling (分块) 的大小
// 假设 A, B, C 矩阵都存储在 DRAM 中
// 数据布局被重排以匹配分块策略,例如 A 的维度是 (n/v1, n/v3, v1, v3)
dram float A[n/v1][n/v3][v1][v3];
dram float B[n/v2][n/v3][v2][v3];
dram float C[n/v1][n/v2][v1][v2];
// 循环遍历输出矩阵 C 的行块 (block row)
for (int i=0; i<n/v1; ++i) {
// 循环遍历输出矩阵 C 的列块 (block column)
for (int j=0; j<n/v2; ++j) {
// 在寄存器中分配一个 v1 x v2 的块,用于累加 C[i][j] 的结果
register float c[v1][v2] = {0};
// 沿着 k 维度循环,这是矩阵乘法的缩减维度 (reduction dimension)
for (int k=0; k<n/v3; ++k) {
// 从 DRAM 加载 A 的一个 v1 x v3 块到寄存器 a 中
register float a[v1][v3] = A[i][k];
// 从 DRAM 加载 B 的一个 v2 x v3 块到寄存器 b 中
register float b[v2][v3] = B[j][k];
// 计算两个寄存器块的点积 (a * b.T) 并累加到寄存器 c 中
c += dot(a, b.T);
}
// 当k循环结束后,将寄存器c中累加完毕的结果块写回到 DRAM 中的 C[i][j]
C[i][j] = c;
}
}- 分块后的成本分析:
A的dram->register时间成本:B的dram->register时间成本:- 总加载成本:
register内存成本:
缓存行感知分块 (Cache line aware tiling)
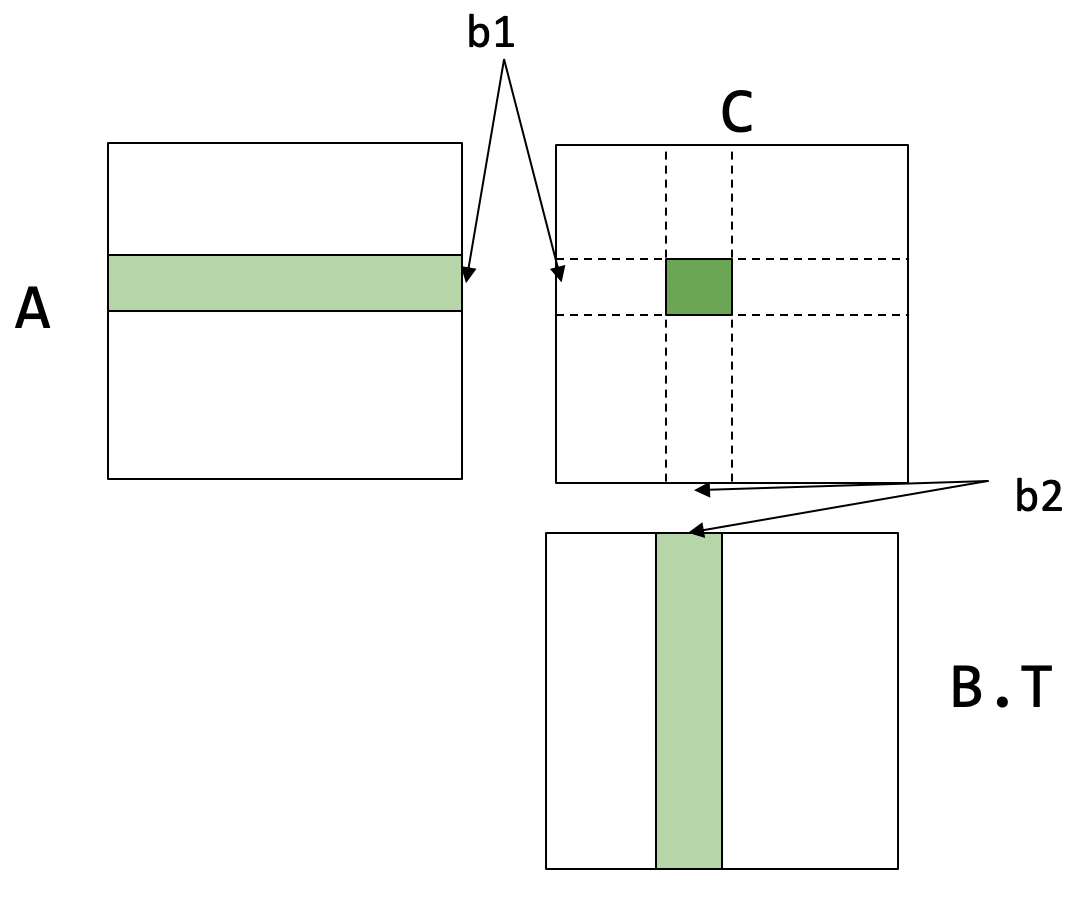
// b1, b2 是缓存分块的大小
dram float A[n/b1][b1][n];
dram float B[n/b2][b2][n];
dram float C[n/b1][n/b2][b1][b2];
for (int i=0; i<n/b1; ++i) {
l1cache float a[b1][n] = A[i];
for (int j=0; j<n/b2; ++j) {
l1cache b[b2][n] = B[j];
// 子过程,可以在这里应用寄存器分块
C[i][j] = dot(a, b.T);
}
}- 缓存分块成本分析:
A的dram->l1时间成本:B的dram->l1时间成本:
- 约束条件:
- 加载到 L1 缓存的数据块大小不能超过 L1 缓存的容量:
- 为了在
dot子过程中继续应用寄存器分块: ,
整合两种分块方法
// 结合缓存分块和寄存器分块
dram float A[n/b1][b1/v1][n][v1];
dram float B[n/b2][b2/v2][n][v2];
for (int i=0; i<n/b1; ++i) {
l1cache float a[b1/v1][n][v1] = A[i];
for (int j=0; j<n/b2; ++j) {
l1cache b[b2/v2][n][v2] = B[j];
for (int x=0; x<b1/v1; ++x)
for (int y=0; y<b2/v2; ++y) {
register float c[v1][v2] = {0};
for (int k=0; k<n; ++k) {
register float ar[v1] = a[x][k][:];
register float br[v2] = b[y][k][:];
c += dot(ar, br.T);
}
// 此处省略了将 c 写回 C 的代码
}
}
}
}- 总加载成本:
核心思想:内存加载复用 (Memory load reuse)
回顾寄存器分块的代码:
for (int i=0; i<n/v1; ++i) {
for (int j=0; j<n/v2; ++j) {
register float c[v1][v2] = {0};
for (int k=0; k<n/v3; ++k) {
register float a[v1][v3] = A[i][k];
register float b[v2][v3] = B[j][k];
c += dot(a, b.T);
}
C[i][j] = c;
}
}- 在内层的
k循环中加载的a块,会在外层的j循环中被复用 次 - 同理,加载的
b块,会在i循环中被复用 次 - 复用大大减少了从
DRAM到register的总数据传输量A的dram->register成本从 降至B的dram->register成本从 降至
常见的复用模式
对于如下形式的计算:
- 对
A的访问 与j无关 - 因此,对
j维度进行大小为v的分块,可以使得A的数据被复用v次
讨论:卷积中可能的复用模式
float Input[n][ci][h][w];
float Weight[co][ci][K][K];
float Output[n][co][h][w];
// 卷积计算公式
Output[b][co][y][x] = sum(Input[b][k][y+ry][x+rx] * Weight[co][k][ry][rx], axis=[k, ry, rx])- 可以思考在
Input和Weight张量的访问中存在哪些复用模式
Lec12 GPU 加速
12.1 GPU 编程
什么是 GPU
与 CPU 相比, GPU 拥有大规模的并行计算单元
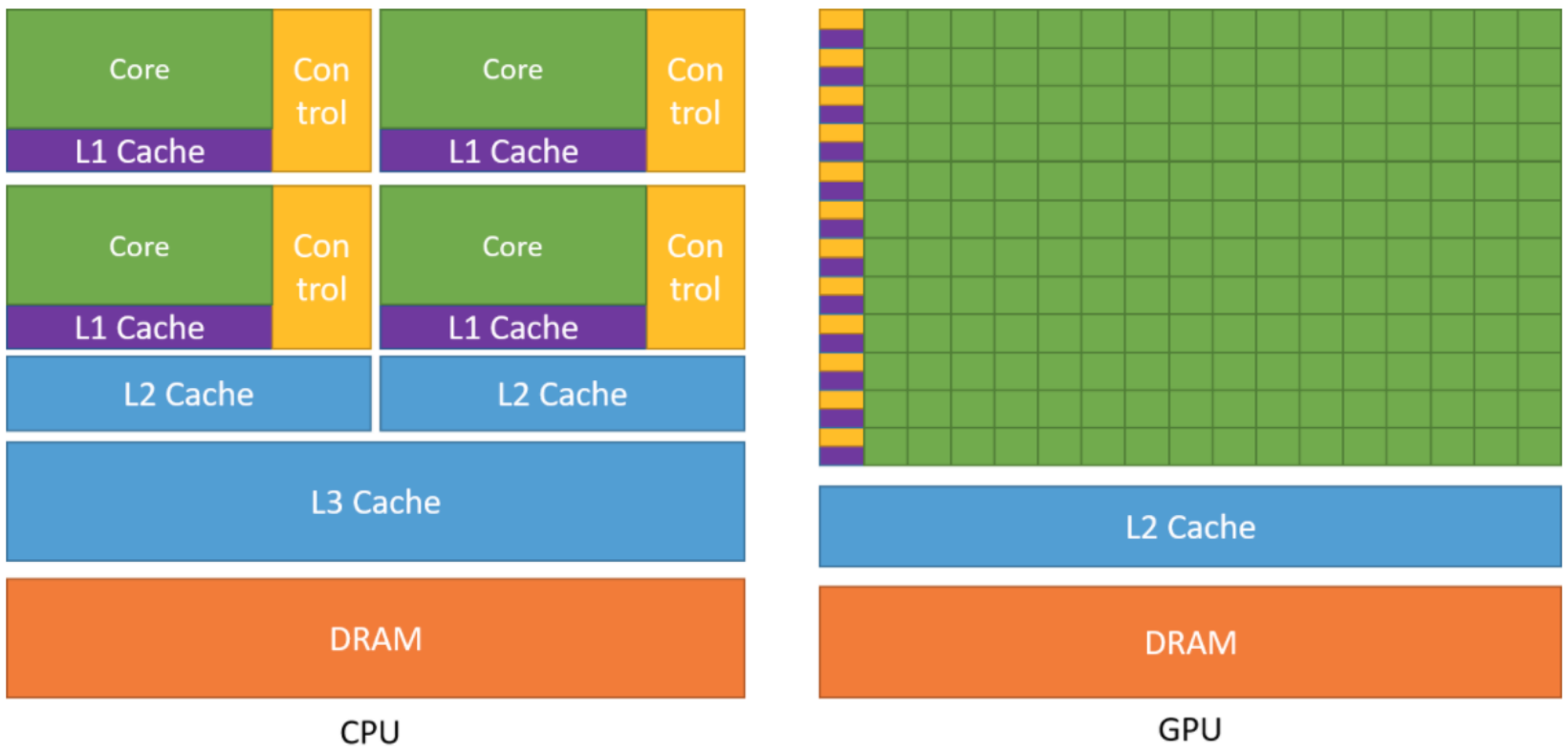
CPU (Central Processing Unit)
- 拥有较少的
Core - 每个
Core配有较大的Control单元和L1 Cache - 拥有共享的
L2 Cache和L3 Cache - 适用于处理复杂的串行任务
- 拥有较少的
GPU (Graphics Processing Unit)
- 拥有海量的
Core(绿色方块) Control单元和Cache相对较小- 通过大量线程并行执行简单任务, 实现高吞吐量
- 拥有海量的
GPU 编程模型: SIMT
GPU 采用 SIMT (Single Instruction Multiple Threads) 编程模型
- 所有线程执行相同的代码, 但可以根据数据走不同的执行路径
CUDA 编程模型术语 (注意: 其他 GPU 编程模型如 OpenCL, SYCL, Metal 也有类似概念)
- Thread
- 最基本的执行单元
- Thread Block
Thread被组织成Block- 同一个
Block内的Thread共享一块Shared Memory, 可以相互协作 - 例如, 下图展示了包含
block0,block1,block2,block3的结构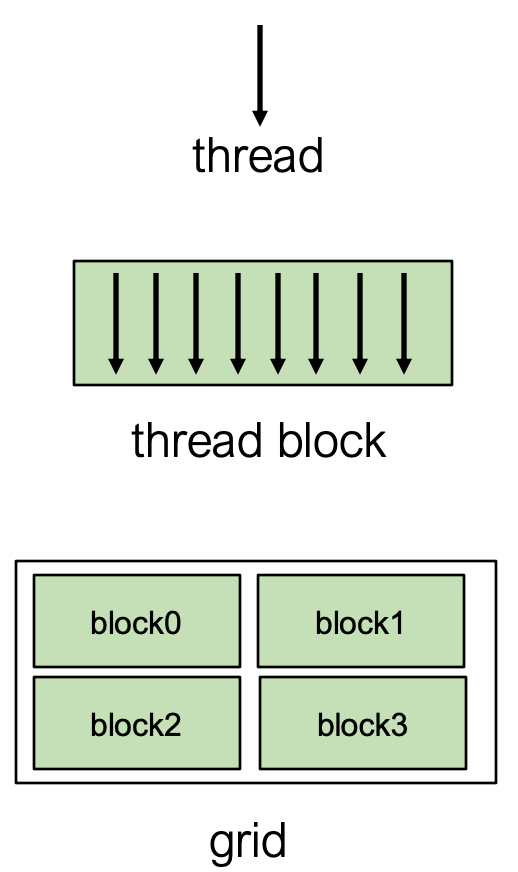
- Grid
Block被组织成Grid- 一个
Kernel函数会启动一个Grid来执行
示例: 向量加法
这是一个在 CPU 和 GPU 上实现向量加法 的对比
CPU 实现
void VecAddCPU(float* A, float* B, float* C, int n) {
for (int i = 0; i < n; ++i) {
C[i] = A[i] + B[i];
}
}GPU 实现 (Kernel 函数)
在 GPU 上执行的函数称为 Kernel, 使用 global 标识符
每个线程负责计算结果向量 C 中的一个元素
__global__ void VecAddKernel(float* A, float* B, float* C, int n) {
// 计算当前线程在全局数据中的索引 i
int i = blockDim.x * blockIdx.x + threadIdx.x;
if (i < n) {
C[i] = A[i] + B[i];
}
}blockIdx.x: 当前Block在Grid中的索引threadIdx.x: 当前Thread在Block中的索引blockDim.x: 每个Block中Thread的数量
线程索引计算图解
假设每个 Block 包含 4 个 Thread (blockDim.x = 4) 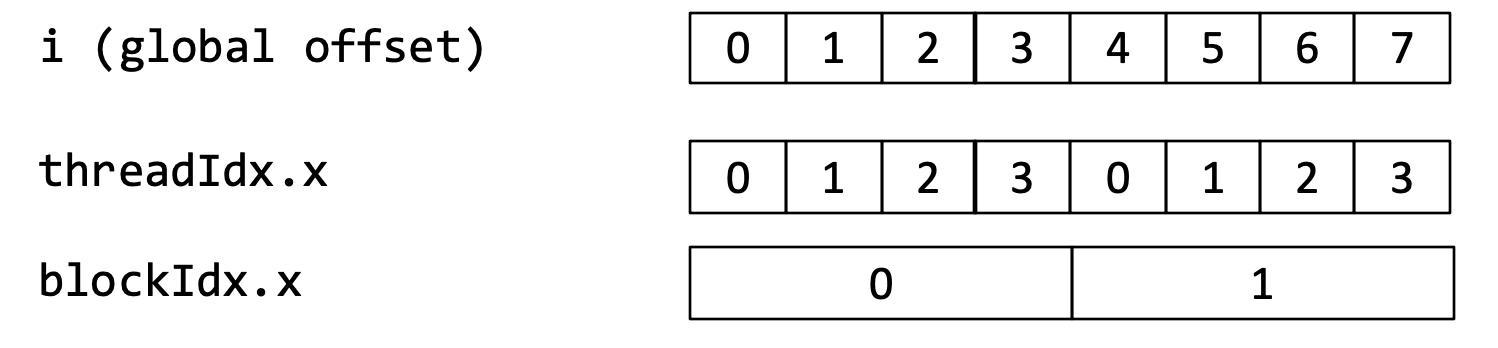 全局索引 的计算公式为:
全局索引 的计算公式为:
本质上不同Thread执行的都是同一段代码, 因为索引不同而产生区别 这段代码不存在数据依赖, 可以非常简单的实现并行计算
Host 端代码
在 CPU (Host) 端, 我们需要:
- 在 GPU (Device) 上分配内存
- 将数据从 Host 拷贝到 Device
- 启动
Kernel函数 - 将结果从 Device 拷贝回 Host
- 释放 Device 上的内存
void VecAddCUDA(float* Acpu, float* Bcpu, float* Ccpu, int n) {
float *dA, *dB, *dC;
// 1. 在 Device 上分配内存
cudaMalloc(&dA, n * sizeof(float));
cudaMalloc(&dB, n * sizeof(float));
cudaMalloc(&dC, n * sizeof(float));
// 2. 将数据从 Host 拷贝到 Device
// 瓶颈在这里, 频繁的PCIe传输过于耗时
cudaMemcpy(dA, Acpu, n * sizeof(float), cudaMemcpyHostToDevice);
cudaMemcpy(dB, Bcpu, n * sizeof(float), cudaMemcpyHostToDevice);
// 3. 启动 Kernel
int threads_per_block = 512;
int nblocks = (n + threads_per_block - 1) / threads_per_block;
VecAddKernel<<<nblocks, threads_per_block>>>(dA, dB, dC, n);
// 4. 将结果从 Device 拷贝回 Host
cudaMemcpy(Ccpu, dC, n * sizeof(float), cudaMemcpyDeviceToHost);
// 5. 释放 Device 内存
cudaFree(dA);
cudaFree(dB);
cudaFree(dC);
}注意: 实际应用中, 为了避免频繁的内存拷贝开销, 数据通常会尽可能长时间地保留在 GPU 内存中
其他 GPU 编程模型示例
OpenCL (用于 ARM GPU 等)
kernel void VecAdd(__global float *a,
__global float* b,
__global float* c,
int n) {
int gid = get_global_id(0);
if (gid < n) {
c[gid] = a[gid] + b[gid];
}
}Metal (用于 Apple 设备)
kernel void VecAdd(float* a [[buffer(0)]],
float* b [[buffer(1)]],
float* c [[buffer(2)]], // 应该是 buffer(2)
uint gid [[thread_position_in_grid]],
int n) {
if (gid < n) {
c[gid] = a[gid] + b[gid];
}
}GPU 内存层级
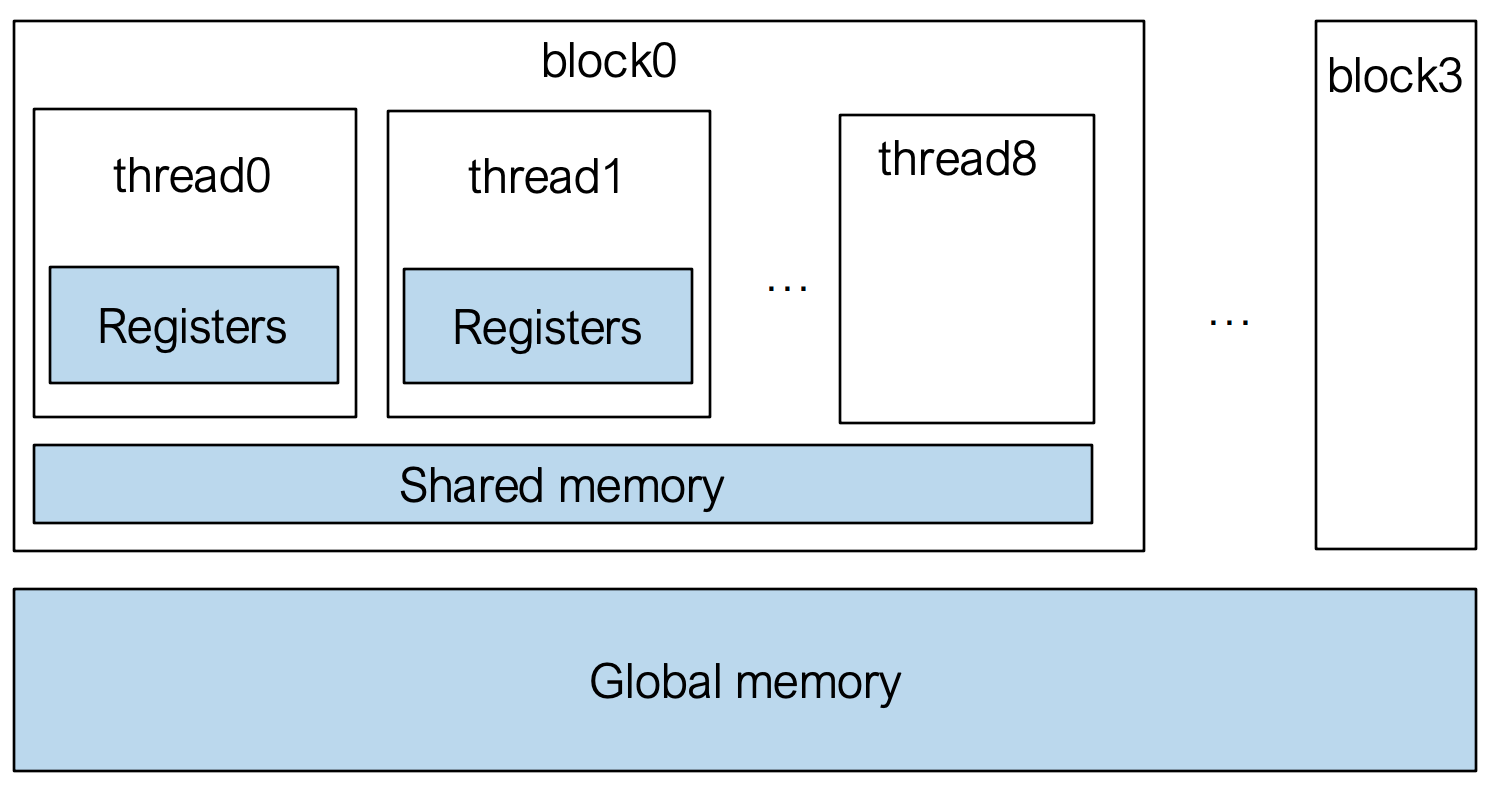
- Registers:
- 每个
Thread私有 - 速度最快
- 生命周期与
Thread相同
- 每个
- Shared Memory:
- 每个
Thread Block共享 - 速度快于
Global Memory - 用于
Block内Thread间的通信与数据共享
- 每个
- Global Memory:
- 所有
Thread均可访问 (整个Grid) - 速度最慢, 延迟最高
- 容量最大
- 所有
示例: 窗口求和 (Window Sum)
任务: 对输入数组 A, 计算一个滑动窗口内元素的和, 存入 B (窗口半径 RADIUS = 2)
简单实现 (只用 Global Memory)
每个线程独立从 Global Memory 中读取所有需要的元素 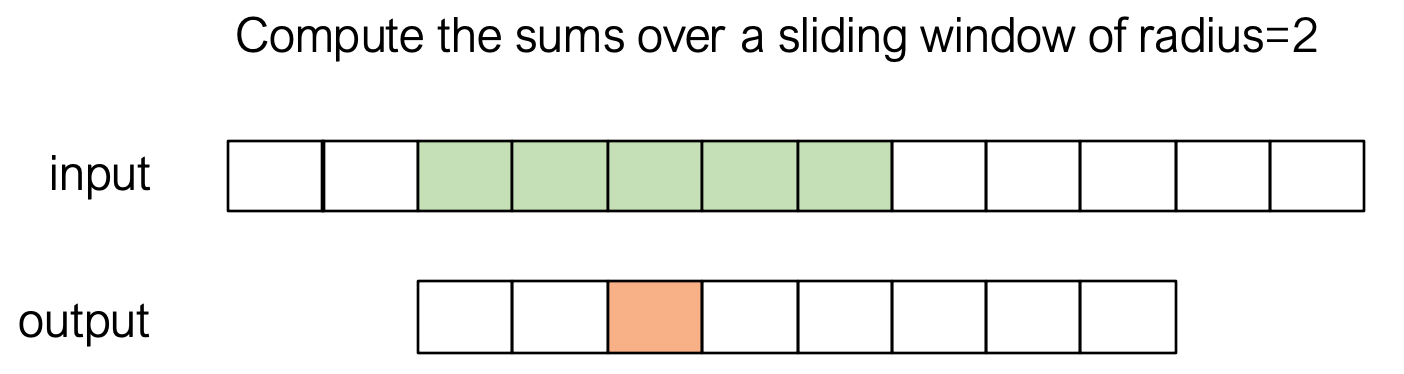
#define RADIUS 2
__global__ void WindowSumSimpleKernel(float* A, float* B, int n) {
int out_idx = blockDim.x * blockIdx.x + threadIdx.x;
if (out_idx < n) {
float sum = 0;
for (int dx = -RADIUS; dx <= RADIUS; ++dx) {
sum += A[dx + out_idx + RADIUS];
}
B[out_idx] = sum;
}
}- 问题: 相邻线程读取的数据有大量重叠, 导致对
Global Memory的重复访问, 效率低下
使用 Shared Memory 的优化实现
利用 Block 内线程协作, 将计算所需的数据一次性从 Global Memory 读入 Shared Memory, 然后每个线程从 Shared Memory 中读取数据进行计算
__global__ void WindowSumSharedKernel(float* A, float* B, int n) {
// 1. 在 Shared Memory 中声明一个临时数组
__shared__ float temp[THREADS_PER_BLOCK + 2 * RADIUS];
int base = blockDim.x * blockIdx.x;
int out_idx = base + threadIdx.x;
// 2. 协作将数据从 Global Memory 载入 Shared Memory
// 载入核心部分
if (base + threadIdx.x < n) {
temp[threadIdx.x + RADIUS] = A[base + threadIdx.x]; // 偏移 RADIUS
}
// 载入处理边界所需的 "ghost" 元素
if (threadIdx.x < RADIUS) {
if (base + threadIdx.x - RADIUS >= 0)
temp[threadIdx.x] = A[base + threadIdx.x - RADIUS];
if (base + THREADS_PER_BLOCK + threadIdx.x < n)
temp[threadIdx.x + THREADS_PER_BLOCK + RADIUS] = A[base + THREADS_PER_BLOCK + threadIdx.x];
}
// 3. 同步, 确保所有数据都已载入 Shared Memory
__syncthreads();
// 4. 从 Shared Memory 中读取数据进行计算
if (out_idx < n) {
float sum = 0;
for (int dx = -RADIUS; dx <= RADIUS; ++dx) {
sum += temp[threadIdx.x + RADIUS + dx];
}
B[out_idx] = sum;
}
}- 通过协作读取到
Shared Memory, 增加了数据复用, 显著减少了对Global Memory的访问次数
核心要点
- 通过启动
Grid和Block来组织大量线程 - 通过协作将数据块读取到
Shared Memory中以增加数据复用, 这是 GPU 优化的关键技巧
12.2 案例学习: GPU 上的矩阵乘法
线程级别优化: Register Tiling
思路: 每个线程负责计算结果矩阵 C 的一个 的小块, 这个小块的数据 (c[V][V]) 直接存储在寄存器中以获得最高访问速度 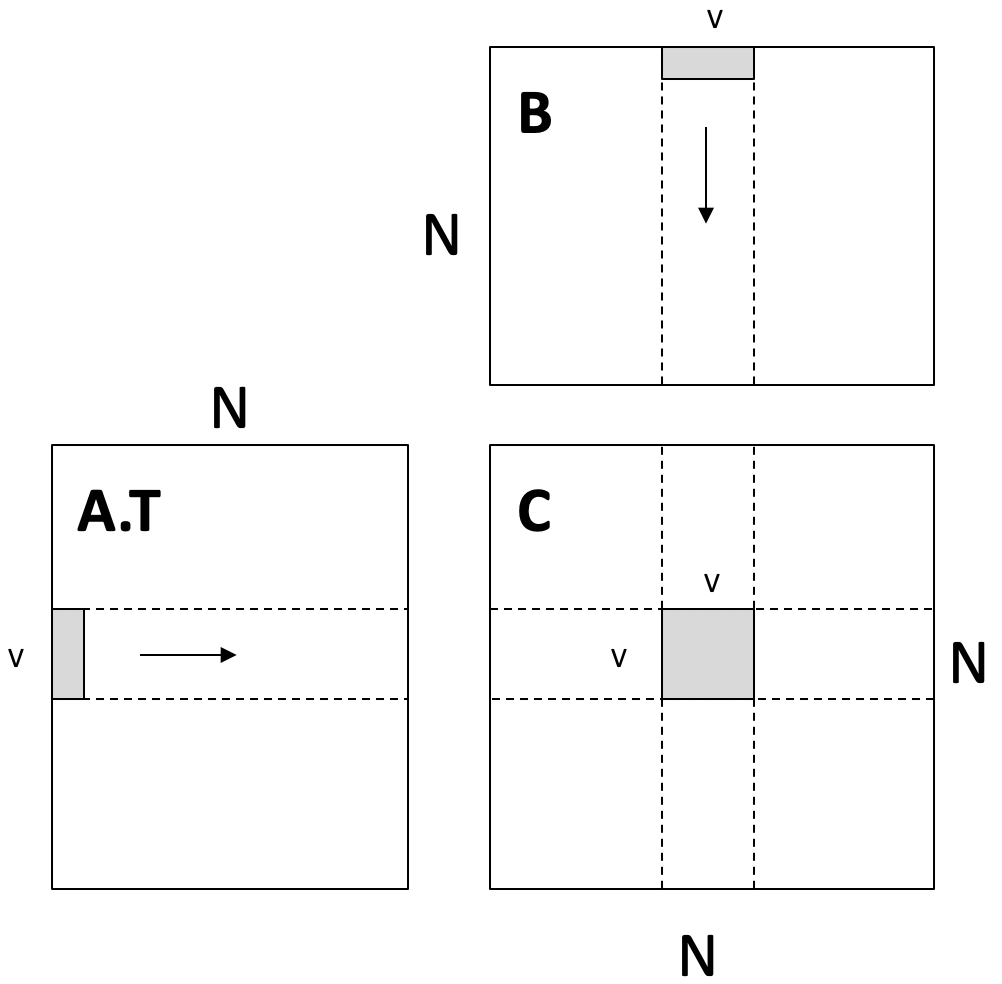
- 每个线程从
A.T的一行和B的一列中分别读取V个元素, 计算出一个外积, 累加到寄存器中的 块
// C = A.T * B
__global__ void mm(float A[N][N], float B[N][N], float C[N][N]) {
int ybase = blockIdx.y * blockDim.y + threadIdx.y;
int xbase = blockIdx.x * blockDim.x + threadIdx.x;
float c[V][V] = {0}; // V*V 的结果块, 存储在寄存器中
float a[V], b[V]; // 临时存储从 A 和 B 读取的数据
for (int k = 0; k < N; ++k) {
// 从 Global Memory 读取数据
a[:] = A[k, ybase*V : ybase*V + V];
b[:] = B[k, xbase*V : xbase*V + V];
// 在寄存器中计算外积并累加
for (int y = 0; y < V; ++y) {
for (int x = 0; x < V; ++x) {
c[y][x] += a[y] * b[x];
}
}
}
// 将结果写回 Global Memory
C[ybase*V : ybase*V+V, xbase*V : xbase*V+V] = c[:];
}块级别优化: Shared Memory Tiling
思路: 每个 Thread Block 负责计算 C 的一个 的块, 每个线程依然计算其 的子块. Block 内的线程协作地将 A 和 B 的子块 (tile) 载入 Shared Memory, 然后所有线程从 Shared Memory 中读取数据进行计算
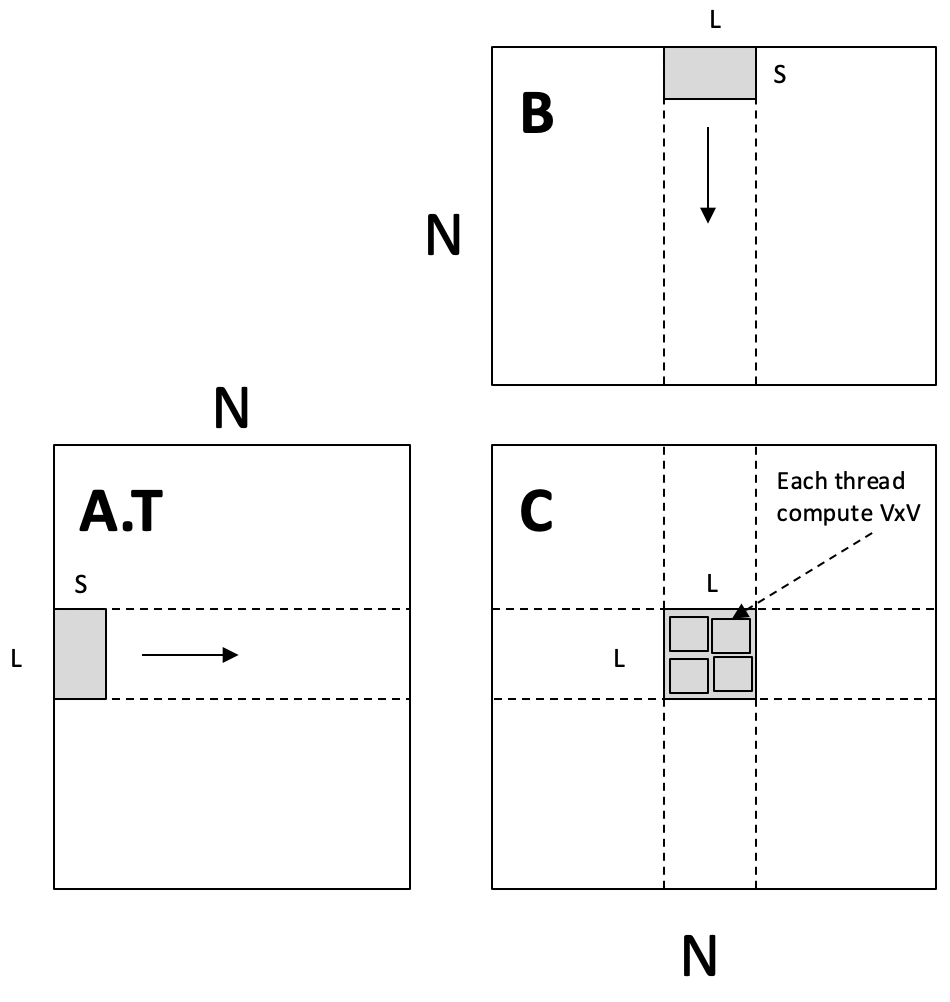
- 每个
Block从A.T和B中载入 和 的数据块到Shared Memory Block内的每个Thread再从Shared Memory读取数据, 计算自己的 结果块
__global__ void mm(float A[N][N], float B[N][N], float C[N][N]) {
__shared__ float sA[S][L], sB[S][L]; // Shared Memory 中的数据块
float c[V][V] = {0}; // 每个线程的寄存器数据块
float a[V], b[V];
int yblock = blockIdx.y;
int xblock = blockIdx.x;
for (int ko = 0; ko < N; ko += S) {
// 1. 协作将 Global Memory 数据载入 Shared Memory
// SA[:,:] = A[ko:ko+S, yblock*L : yblock*L+L];
// sB[:,:] = B[ko:ko+S, xblock*L : xblock*L+L];
__syncthreads(); // 等待所有线程完成载入
// 2. 从 Shared Memory 读取数据到寄存器, 进行计算
for (int ki = 0; ki < S; ++ki) {
a[:] = sA[ki, threadIdx.y*V : threadIdx.y*V+V];
b[:] = sB[ki, threadIdx.x*V : threadIdx.x*V+V]; // PPT原文为 sA, 应为 sB
for (int y = 0; y < V; ++y) {
for (int x = 0; x < V; ++x) {
c[y][x] += a[y] * b[x];
}
}
}
__syncthreads(); // 同步, 准备载入下一批数据块
}
// ... 将 c 写回 Global Memory ...
}内存复用分析
Global -> Shared 拷贝:
Shared -> Register 拷贝:
通过增大 L 和 V 的值, 可以显著提高数据在 Shared Memory 和 Register 中的复用率, 从而减少对慢速 Global Memory 的访问
展开协作式数据获取
将数据从 Global Memory 载入 Shared Memory (SA[:,:] = A[...]) 的具体实现如下:
// blockDim.y * blockDim.x
int nthreads = blockDim.y * blockDim.x;
// threadIdx.y * blockDim.x + threadIdx.x
int tid = threadIdx.y * blockDim.x + threadIdx.x;
for(int j = 0; j < L*S / nthreads; ++j) {
int y = (j * nthreads + tid) / L;
int x = (j * nthreads + tid) % L;
sA[y, x] = A[ko+y, yblock*L+x]; // sA in ppt, not s
}更多 GPU 优化技巧
- Global Memory Coalescing (全局内存连续读取): 让同一个
Warp中的线程连续访问Global Memory地址, 可以合并成一次内存事务, 提高带宽利用率 - Shared Memory Bank Conflict:
Shared Memory分为多个Bank, 如果Warp内多个线程同时访问同一个Bank, 就会发生冲突, 导致访问串行化, 降低性能 - Software Pipelining: 通过软件技术重叠数据加载和计算指令, 隐藏内存访问延迟
- Warp Level Optimizations: 针对
Warp(一组32个线程)的特性进行优化 - Tensor Core: 利用 NVIDIA GPU 中的专用硬件单元加速矩阵乘加运算
更多细节请查阅 CUDA Programming Guide